Disclaimer
Some of the information presented and discussed on this site refers to difficult and unforgiving situations at sea and in parts of the world where no timely assistance can be expected. This information shall not be construed as advice to act in a certain manner. It only represents personal experience and views shared by the author to provide a perspective and prompt reflection.
Different yachts handle differently, some designs run into severe limits in bad weather that can irremediably compromise their safety and the life of those on board, and conditions are never twice the same. In many cases, should you decide to tackle some of the oceans and areas featured here, take your vessel where it shouldn't be or make a wrong call, you will die and probably never be found. What you decide to do is your entire responsibility. It is your freedom too. Take great care of it.

Great job!
I’m amateur builder and I’m preparing for building own round bilge hull (but in steel) and I wanted to ask about wheeling.
And when I saw your work and result of wheeling I was positively suprised.
The shaping is made by a stress in material, so the thickness of the metal sheet is changing right?
So how much this change of thickness is?
Hello Peter,
Thank you for your kind comments. Building round bilge hulls is much easier than it looks.
Practically, the variation in the thickness of the plate due to the forming process would hardly be measurable, because you always try to “gain” very small amounts of material over relatively large areas. When wheeling aluminium plates, you never crush the plate between the wheels, it is not a laminating process.
In my case, the bottom wheel was hollow V-shaped and the top one was full with a light curve only, so it wouldn’t press a ridge in the material. Obtaining the shape was really achieved through a combination of wheeling, stressing of the plate over the framing and yield of the material during progressive welding to the frames under tension. I wish my wheeling setup had been good enough to obtain the full compound shape, but it wasn’t by far and marine grade aluminium is incredibly stiff. I mainly wheeled the “short” curve in my plates, and I obtained the other one when fitting and welding the plate into place. When an edge occasionally buckled, I cheated and put a short saw cut into it and welded it to “lose” some material.
With steel, I am not sure I would go about it the same way. You have more options. If you sandblast a steel plate on the ground, it will curve like a spoon and come up. You can also shrink its edges by heating them with a torch and letting the metal cool down (this is absolutely out of the question with aluminium, because the sheets are heat-treated for strength). I have heard of people who plated beautiful round-bilge steel hulls with very little mechanical forming and this is how I would approach it. It also depends a bit on how thick your plates are going to be.
Start in an area that is easy on your hull and get a feel for what the material will do for you. If it is too hard, don’t force it. Stop, think and find a better way. I had a 1:10 scale model of my hull and I played with a piece of cardboard to get a feel about the way I should arrange the seams. It is usually a good idea to plate the sides and the bottom with the largest plates you can shape and fit (within reason), and then you are left with closing the gaps around the turn of the bilge using smaller plates.
Plating a metal hull is fast and very rewarding, so all the best with your project!
Best regards,
Eric
Thank you for information. Now everything is clear: bottom bending roll is hidden, so thought there is a “barrel” roll.
Right now I’m making some research about home made wheeling machines, because my Ankon 40 will be build from steel up to 6mm (at the moment I’m waiting for plans and later I will have a lot mor work to prepare everything but I’m stubborn pearson and that’s perfect for my motivation). So the machine should have extreme stiffness and of course some drive.
Every tips and tricks are welcome. So again thank you!
Best regards,
Peter
Peter,
The bottom roller can be one roller wider and with more hollow that the top wheel, two separate wheels… many configurations work. My wheeling machine was powered and it made it slow, but some people have built boats pushing and pulling the plates underneath the wheel. The shorter your distances between the pressure points, the more force is needed and the more likely the need for a motor.
6mm steel sounds extremely heavy for just a 40′, hopefully it is confined to very small sections of the plating. Remember that the thickness of the hull is not a parameter you can freely modify to suit your own ideas, there is some relevant information about this on this page.
Best regards,
Eric
For luck most of the hull is 4mm plates and deck 3mm, but the bottom next to keel is also round and it is from 6mm thick steel.
I was looking for some wheeling machines but only source of heavy duty e-wheeling machines I have found was in New Zealand. I have some basic details about the frame for that kind thick steel plates, so I think I will build it, just waiting for plans to figure out what wide plates I will have to use (shorter arm of the wheeling machine less I-beam high needed – I don’t want to overinvest in machine I will use just once, and I don’t to make to “small” machine).
Thank you for the link. I have already read some articles from your site, they’re very helpfull.
Again thank you for encourage words.
Peter
Love your design, how many have been built? Has there been any interest in the longer versions you mention? What would you expect the performance gains to be for the 44′ version?
Graeme,
We built the one in the photos, launched in 2005, then the idea was using it to promote the design etc. It was a very long way from its target market however and the plan slept in my files until last year when I decided to do something with it. Several people tried to buy the finished boat in recent years. In the end it was just too successful in terms of seaworthiness and efficiency not to give it better exposure and I created this site.
There has been a lot of interest from Europe in a slightly modified version at 36′ (just below 11 metres for marinas etc), with a steeper stem, a longer cabin, covered after deck and a slightly lowered profile overall, but nothing done yet. A very capable yard in Poland is interested in building them at a competitive price.
I need to take the time and create a page for it one of these days.
There have been occasional discussions about longer ones, but nothing definitive. A 44′ one would cruise very economically at ~10 knots with a higher top speed again. I also have a few ideas to make them go faster, but I need to do some CFD in this direction before I can say more. It has to do with the aft keel design and the stern sections.
A 44-footer with a little more beam and volume would be a fantastic project and it would give passage-making capabilities together with greater habitability to live on board for long periods.
Best regards,
Eric
Hello!
After long time of hold on I’m back to the project of my steel sailboat. I’m preparing to the crowdfunding start.
Because I think your site is very interesting and have great knowledge (and in return for sharing information about bending machines) I also put a link to Nordkyn Design at my page.
Thank you again!
Thank you Peter, it is nice to hear from you again. I wish you all the best with construction. Building a yacht is a great project with a lot of satisfaction in it.
Eric
Can you explain in more detail why you say the negative side of sources and loads also need to be separated? It seems you want all current, whether in or out to be going through a single path (shunt or hall effect sensor) anyway. It would seem that high side contactors can be used on the positive side and that’s enough. What am I missing?
Thanks,
Jim
p.s. very nicely done explanations on your pages, thanks much.
Jim,
I had to search the page and re-read my text to understand the motivation for your query. I will now alter the way I worded this to clarify that only the positive bus needs to be split to segregate charging sources and loads. A common negative is usually fine.
There is one situation where you would split the negative bus and it is if you wanted to sense (on the low side): 1/ current produced, 2/ current used and 3/ battery current to get a full picture of the current flow in the installation. This would require three sensors however.
The most common arrangement is sensing battery current only and then a single shunt or sensor between the common negative busbar and the battery bank is all that is required.
I have been working on an article detailing the electrical design on board and available options to integrate a lithium bank, but producing this kind of material is extremely time consuming and it is forever competing for time with engineering and design work.
In the meanwhile, I will give you a couple of leads here when it comes to split buses and charging buses:
First, you really need to make sure that you can’t end up with both buses linked and no battery in the system. If this happens, you can damage the entire electrical system on board. Good design easily rules out this possibility, but the choice of a common junk-grade BMS solution by many people has caused it to happen many times due to the single battery disconnect contactor.
Second, think about what will happen if you face a high-voltage disconnect where the charging sources get isolated from the bank for protection. Some devices can fail if disconnected under load, or can generate fairly high voltages afterwards on the now open charge bus and damage other sources.
A lot of poorly engineered DIY lithium systems work great initially, until something suddenly happens that results in a great deal of expensive damage on board. We don’t hear so much about this on the internet, but it is surprisingly frequent. Engineering the installation properly requires a lot of thought, but it is perfectly achievable.
Thank you for pointing out the need for clarification in this article, much appreciated.
Best regards,
Eric
This is a really good article. Thanks for the time you took to write it and I hope it helps a lot of cruisers!
Bob,
Thank you for your kind words, you have been in this field for quite a while… Late last year I saw a lithium battery fiasco of such a magnitude that it prompted me to start writing this material. At the time, the owner didn’t even understand how and why it had suddenly gone so wrong.
The electrical engineering component present in these systems is too often not identified properly or discounted, but it really is the backbone of the installation.
Best regards,
Eric
Hi Eric,
I wonder did the equivalent weight of both All Black props squeezed into the pulpit, prompt you to consider shifting the ground tackle locker back a bit? The idea of a significant reduction in that contribution to the pitching inertia sounds pretty attractive – but then you would have to faff around with spurling pipes and chain under sails, not to mention figuring out where to put the sail hatch etc. Or did you surmise(correctly as it turned out) that Nordkyn’s full forward sections would provide sufficient buoyancy and you could put the tackle where it belongs?
Regards – Peter
Peter,
I found from direct experience that, on ocean cruising yachts, you are nearly always looking for weight forward. This is because the centre of gravity must be maintained at 53-54% of the waterline length and there is a lot more hull volume aft of this than forward. It is even more so the case in current designs and gear on board tends to go where there is space for it.
The first time I loaded the 9-metre sloop Yarra with everything I was going to take with me, the result was a trim down by the stern and I had to reshuffle all the heavy items forward to correct this.
In the case of Nordkyn, I designed a neutral trim in light and loaded conditions and the ground tackle is of course included in light trim. I carry 80 metres of 13mm chain and a couple of anchors. I keep 50 metres of chain and a 45lbs hook in the chain locker forward and the balance is down below in the sail locker a bit further back.
The question of inertia is interesting, because sometimes increasing it changes the pitching period of the boat away from the most common wave encounter frequencies and it can improve seakeeping and performance. Modern hulls, with wide flat runs aft, tend not to pitch because the stern can’t go down and it makes them less sensitive to weight distribution.
I wasn’t particularly concerned about the weight of the ground tackle forward on Nordkyn. The hull is fine forward, but I has more flare and volume above the waterline than many designs. The driver for this was the risk of hitting a “bump” at high speed and while reduced mass forward helps, we are talking about less than 250kg of steel in the chain locker on one side and a couple of cubic metres of buoyancy in the forward sections on the other… the stem freeboard is 1400mm. Overall, the boat is incredibly dry, I can usually change a headsail upwind without getting wet, so it worked out well.
It would be possible to shift things around and move the chain back and then I would also slightly offset the keel bulb forward to compensate. Not having the chain crossing half of the foredeck solves issues with the sail locker hatch as you point out and this is quite important because all the headsails go through there.
Kind regards,
Eric
Hi Eric,
Will you explain why the CG should be 53-54% of the waterline length – and are you talking about the DWL and not the actual (heeled) running length that you say should be used for D/L calculations?
Elsewhere you talk about the need for a separation between the CB and the (geometric?) centre of the waterplane. Why is this?
Thanks – Peter
Peter,
A large number of experiments were conducted at Delft TU with model yacht hulls (the Delft Systematic Series) and correlations between the longitudinal position of the centre of buoyancy (LCB, =LCG) as well as other parameters and hull resistance were extracted. The optimum position for the LCG depends on what speed you want to design for, but 53-54% LWL from the bow is the value most commonly used when designing cruising yachts. Because they used the length of the static waterline in their regression analysis and their hulls had overhangs, there are no reasons to deviate from their definition of LWL.
Actual waterline length is what determines key characteristics of the wave system produced by the hull at a given speed, so if you are interested in wakes and speed potential, you should consider true wetted length. L/D ratios really are a measure of speed potential, which also means you need enough wind in order to exploit them. This little detail is often lost from sight or not understood.
In light weather, L/D means very little. It becomes a matter of sail area/wetted surface. High values for L/D (or small values for the more traditional inverse D/L value) tend to penalise SA/WS, unless you can find a lot of stability and carry a big rig to offset it. This is very much what I ended up doing with Nordkyn, because I wasn’t prepared to sacrifice light weather performance.
The centre of the waterplane is something else altogether. The hull tends to pitch around an axis running through the centre of the waterplane (LCF), because for a small change in trim, you gain and lose the same amount of buoyancy fore-and-aft of this axis. However, if you throw an object up in the air, it always revolves around its centre of mass (CG).
A hull is the same. Ideally, it would pitch around its LCG, but it can only do so if the CG is also at the centre of the waterplane. Separating the two increases the amount of energy required to pitch the hull, because you now need to accelerate the centre of mass up and down in the process, instead of just rotating around it. This effectively increases pitching inertia and it tends to be beneficial, because you are better off cutting through short waves rather than trying to follow them.
Regards,
Eric
Hi Eric,
The ‘Patagonian Pundits’ seem to be fond of big anchors and some even use ‘slim’ HT chain whereas you seem to favour the reverse approach – but then how big is your other anchor? And you’ve got only two?
Unsuprisingly you still use the now much maligned CQR but do you carry any other types as well?
Are you familiar with Van Dorn’s work on elastic anchoring and do you or have you ever used a rope/chain combination in your primary rode?
Do you carry long(>100m) shorelines?
Peter,
I have had CQR anchors for close to 30 years and used them all over the world. I have yet to find a reason to use something else. The difference may be that I use them at the end of a decent chain. I would consider using a Rocna for example, but not following the ridiculous chain recommendations that come with them (“buy a bigger anchor from us, so you can use a smaller chain” – the apex of stupidity).
A Rocna will let go without any warning if you happen to be pulling upwards on it because the chain is too light, and then you go from anchored to wrecked on the shore in one smooth single move.
I sailed Tierra del Fuego and the Patagonian Channels and completely disregarded all “advice” on the simple basis that the sloop Yarra was carrying the same chain as what the much larger steel charter yachts did: 80 metres of 10mm. I anchored almost every night for weeks, spent days storm-bound in anchorages and never considered taking a line ashore (what a joke for a single-hander arriving in a windy anchorage anyway) and I don’t care about what “people” say, because the bottom line is that you don’t argue with success. In Patagonia, I usually accepted to anchor in 60-80 feet of water. It was deep enough to avoid kelp beds and a look at the depth sounder was sufficient to show whether the bottom profile was smooth (sand, mud etc) or jagged (rock). I was able to get excellent holding.
I made an exception to this if there was a river or waterfall, because it was then usually possible to find a good sandy bottom at a shallower depth and this meant less work the next morning before leaving.
I saw the same clowns trying to anchor close inshore in the Antarctic Peninsula (where holding is abject), then taking lines ashore where there was essentially nothing to tie up to, and then dragging and getting pushed onto the beaches. Meanwhile, I was anchored alone in the middle and deepest part of the cove, where the bottom was thick heavy mud.
Of course, I was wrong and they were right, but they were also the ones aground on the beach scrambling around in dinghies to try and get themselves off. What a laugh.
I like to anchor in a decent depth, with 360 degrees swinging room and I don’t want the shore too close, so I have time to do something if I ever need to. Mixed rope/chain rodes and the like are all very well in concept, but chafe considerations simply rule them out for me. If you have enough depth and a sensible chain, the catenary effect provides plenty of elastic damping. I simply use all chain and hardly ever deviate. I can remember very few exceptions; one of them was once anchoring in 45 metres of water in the Aleutian Islands: that day I extended the chain with some nylon braid to get the reach and conditions were calm.
All the anchoring arguments always originate from the same simple fact: people don’t want to carry the chain they should have, because they find it too heavy to handle, the windlass would be too big etc. Meanwhile, a long heavy anchor chain is better than all the insurance policies you can have.
Nordkyn carries 80 metres of 13mm chain and considering that the rig is almost twice as tall as the mast of the Yarra, it would be completely foolish to even pretend anchoring on 10mm chain. Yet, 10mm chain is what some people were carrying on 48′ steel ketches with a displacement of 20 tonnes or more in Ushuaia.
Then the extent of the drama they face make them Patagonia anchoring experts, with fancy-fangled advice about shore lines and tying to trees. Sure, whatever.
Eric
Hi Eric,
You say……” it is the appraisal of those qualitative aspects and the fundamental understanding of what matters, how and why based on years at sea that was going to differentiate the project.
At times, this involved taking some design risks and departing from common trends.”
What were the risks?
Regards – Peter
Peter,
When you depart from what is already out there, the risk you are taking is getting a boat that doesn’t perform to expectations, or exhibit surprising, undesirable characteristics. Innovation is not a decision to be taken lightly, due to the potential cost of a mistake.
This explains why, in the field of yacht design, we see very, very little real innovation. There are lots of names, but most merely make their own version of what already exists. Then the whole discussion revolves around looks and features: the actual sea-going aspect of the boat is quickly swept away. This is not interesting.
When everything goes well, the styling and features don’t actually detract from seakeeping. Unfortunately, most of the time, they do, considerably.
Once you start making true design decisions and deviate from the norm, you can bet that you are going to get feedback about your performance as a designer: sea trials will ensure that. It also means that the outcome of the project can suddenly look less certain, and even more so when you consider that most designers are not hydrodynamicists and can’t predict the flow around a hull shape or its performance from physical principles, by a very long way.
Yacht design is first and foremost a game of copycats: basically the same, just looking different. In the cruising arena, the competition is on “features”. In the racing world, much more effort goes towards low weight, construction and material aspects than shape. It is easier and safer. Many radical “go-fast” shape options proved to be nothing less than disasters: they were found to have drawbacks. Often, a better understanding of hydrodynamics and the physics of sailing could have spared the experiment altogether too. In the early days, I spent a lot of time looking at “failed” racing yachts on the hardstand: there was so much to learn at zero cost!
The sloop Nordkyn is quite different in many ways than common modern yachts and it was even much more distinctive when created back in 2001-2003. I wanted some specific characteristics that were problematic to find in an existing boat and I had spent a lot of time thinking about those things at sea in all weather conditions.
I developed my own performance prediction software while designing it, because I needed this to explore the interactions between design parameters. It is too complex to guess them. I also created a large number of hulls over almost 3 years and assessed each one of them at various angles of heel before finally settling on one. It was about balance, course stability and performance both up and downwind. After retaining a design, I took the time to build a model of the hull and test it. The launch Wild South was also model-tested: at first, making a light displacement, unballasted and yet fully self-righting motor yacht looked like a risky bet in terms of motion and comfort at sea.
In comparison, the design of most yacht hulls is something that gets done and dusted in a few days at the most, and often in less than a day with 3D CAD and hydrostatics instantaneously available. If you are experienced at drawing hulls, you can come up with something comparable to what is out there in a matter of hours while also hitting your displacement target and all other hydrostatic constraints.
A great deal of “design” time then gets spent fluffing around the look of the boat, the features, the interior, the “systems” and other gadgets to be offered. This is not naval architecture, it is just a styling and marketing exercise to sell the boats. It does nothing to make good sea boats.
If instead you want your hull to achieve specific properties at different angles of heel, keep other aspects constant, ensure there is no coupling between heel and trim and also meet conditions dictated by hydrodynamics or design choices, then hull design can turn into a fairly challenging and non-trivial exercise.
Some offices do carry out design research – like Bray in Canada – they think about the physics and make their own decisions, but those are few and even more so when it comes to cruising boats. In fact, the more “cruising” boats are, the worse they tend to get.
What people don’t realise is that sailing a tub day in and day out is unrewarding hard work at best, and dangerous at worse; no amount of features and gadgets can offset that either. Cruising on board a brilliant sailing machine instead is a lot of fun, it gets you there in less time, with a fraction of the effort and at a lower cost.
You can always dial a high-performance boat down if you feel like it, but there is nothing you can do to improve a tub. The reality is also that, most of the time, conditions are decent and there is nothing to dial down.
I mentioned Bray Yacht Design because I fully share their views about ballasting: departing from “accepted” ballast ratios was one of the many things I did with the sloop Nordkyn and it didn’t prevent it from achieving a high AVS and plenty of power.
Best regards,
Eric
Hi Eric,
So that’s what’s in the skinny ‘box’ companionway port side; and a good bum brace for the cook as well!
I assume the step and landing come away for engine access – but what about access to the side and rear, especially assuming you installed thorough sound insulation. Do you have any photos?
And where do hang your foulies on coming below – don’t tell me you have to drag them through the saloon to the heads.
Regards – Peter
Peter,
Correct. The skinny box contains the main DC power distribution. It is very close to the engine, alternator and batteries, dry and never hot. Bracing against it at the galley was the design intent and it works very well. If anything, I would make it longer and overlapping the stove some more.
The whole step landing simply lifts off (it is very light, you can carry it with one hand) and there is side access from each one of the aft cabins, as well as access behind (underneath the cockpit) through large panels in the port aft cabin. This allows reaching the shaft seal, exhaust muffler/water trap and some bilge plumbing.
Removing the steps also allows for a straight lift out of the engine, using the boom above or with a crane. It couldn’t be easier or more maintainable. I will add some photos for you, but I might need a few days.
I have some soundproofing material I haven’t so far bothered with (!), first because the engine is not very noisy surrounded by foam core panels, and also because I have only managed to put 107 hours on the clock in 6 years. The ability to sail in very light winds and also point very high upwind means that there are a lot less reasons to motor. Sailing beats soundproofing by a long way. Some soundproofing will get added one day or another, but it is not very high on the list.
I leave my wet weather gear at the entrance on the companionway steps or (rarely) hang it underneath the hatch in front of the galley. It wouldn’t work with a crew going in and out all the time, but it is workable short-handed. It would be easy enough to replace the small lateral seat and shelves in one of the aft cabins with a wet locker, and then it could go in there. Boat layouts are very flexible and I always say that, if you build something new, you should decide what you want and how you want it. Otherwise, what is the point of a custom build? Have it your own way, it is your boat, it only needs to please you.
Some things also originate from the way I sail: I very seldom hang around outside. I have outstanding self-steering arrangements, I set everything and then head down below, where it is infinitely more comfortable than any damned cockpit. Then I regularly peek outside to keep an eye on what is happening, but I don’t spend time in the cockpit. This means that a lot of wet weather stays outside and doesn’t get at me. Occasionally, I have no choice but stand out in the rain…
When I get out, I want to be in the middle of the action with unimpeded access to the helm, winches, steering vane and everything else with a full view, so boat handling is 100% efficient.
Best regards,
Eric
Hi Eric,
” in most cases ventilators and dorade boxes will also contribute to water ingress.” – except Nordkyn doesn’t have any. How do you manage in hot weather or indeed in bad weather?
Your experience leads me to guess that there is as much if not more likelyhood of a yacht “sinking” as a result of collision compared to damage sustained in breaking seas. And in the case of Nordkyn the former seems unlikely given the watertight compartments and presumably her foamed interior.
Regards – Peter
Peter,
Bad weather is the first reason why it doesn’t have any ventilators. With the Yarra, I punched in the North Atlantic at the beginning of winter in sea conditions that saw the entire deck disappear in the sea many, many times. No dorade box can withstand a treatment like that.
I had flat screw caps I could use to seal the ventilators. I put them on early in the voyage and they stayed in place forever after.
I had a small opening port between the chain locker and the inside of the boat and I found this much more useful for getting some airflow in the boat in general and this could stay open in most conditions. In better weather, I keep some deck hatches just cracked open. The Yarra was quite wet forward due to the load on board and lowish freeboard in general, but Nordkyn is exceptionally dry. Both forward hatches open up facing forward and can literally scoop the breeze if desirable and possible. Then the small hatches above the galley and chart table are hinged longitudinally while located a log way aft and they are also very effective at creating air flow. The one on the lee side can usually stay slightly open in most common conditions.
Ventilators on the other hand have little actual flow and I personally find them more a hindrance and a problem than a useful feature. Having none also means they don’t clutter the deck plane, catch sheets etc.
Serious damage due to breaking seas is nearly always the result of poor choices in my view: either the choice of a boat that can’t sail, or the choice of not sailing the boat, hanging around with a beam sea, doing stupid things etc… Collision is rather unlikely and breaching an alloy hull is not that easy (but not impossible either). Watertight bulkheads are there in case of catastrophic event and because, when you build a new boat, they are very easy to implement.
It would take too much water inside before enough of the foam insulation gets immersed and begins to prove useful, but it would help a little eventually. If you want reserve buoyancy against flooding, it needs to be located as low as possible in the hull. I did think about making some/all lockers watertight, but it is a strong constraint and not very easy to build. Partitioning the boat with sealed doors was far more practical.
In terms of survivability, my view is that watertight bulkheads are infinitely more relevant and sensible than stupid liferafts: people die trying to leave the boat. I am not leaving the boat, no matter what. I don’t think “rescue” or “assistance”, ever.
Eric
Hi Eric,
Can I assume from the phrase “all the structural welds inside”, that the foil was not a simple insert into a collar within the floors welded ‘top and bottom’. One of your Interior Construction photos reveals the doubled-up floors in the keel area and I wonder if the foil was attached by welding the floor cut-outs directly to it?
Was there any additional floor strengthening in the keel area?
And did you have to re-inforce the top of the foil to ‘smooth’ the load path?
Thanks – Peter
Peter,
The foil runs through the hull skin (itself thicker in the way of the keel) and is directly welded into the floors themselves. There is no collar or “fastening” arrangement. Once the keel was fully welded, the floors were doubled up around the keel attachment welds, bringing the total metal thickness to 16mm. This was entirely above and beyond structural requirements by the way.
There are additional intermediate floors at 250mm spacing in the way of the keel, tied into the main longitudinal girders. The foil is strong enough throughout to handle the root stresses, which are very well distributed. The keel design is the very wrong place to try and save a few kilograms.
The whole structural arrangement was calculated in three different ways for cross-checking the results, including running full FEA at 90 degrees heel angle, followed by fatigue calculations. Later, when the ISO12215-9 keel structural standard was released, the stresses were compared against it by curiosity and were fine, unsurprisingly.
If one thing can kill you offshore, dropping the keel is certainly it.
Best regards,
Eric
Hi Eric,
Is that plate on the bottom of the forebody similarly thickened like the one around the keel socket?
I wonder, too did you flange the inside of all the floors and bulkhead/partition frames and where you did, was it to stabilize the web and/or provide attachment grounds or both?
Cheers – Peter
Peter,
The plate in the forebody is the same as everywhere else of course. There is nothing special there. The only difference is that the stringer spacing is less forward.
Folding floors and girders is a standard way of building the equivalent of an I-beam once attached to the plating and it keeps them straight. The flanges are important as they work in tension and compression.
Eric
Thanks Eric,
Although I am surprised to hear that the stringer spacing is LESS forward – I would have expected closer spacing in this high-load area.
Also, at what point in the hull build did you weld in the frame/deck beam ‘knees’? I’m guessing after plating.
Regards – Peter
Peter,
Saying that spacing (=distance between) is less means that the stringers are closer together, which is what you should expect in areas where the design pressures are higher, such as the forebody.
The knees were welded into place after plating indeed in this case, in order to minimise distortion. Today I would terminate the extrusions into CNC-cut corner pieces and they would be integral to the frames as they come off the table. It could make construction a bit easier in this area.
In the sail locker forward, the frames and deck beams were also braced together using a length of T-extrusion each time.
Regards,
Eric
Thanks again Eric, this old duffer got it quite wrong. Of course less means closer not fewer.
Cheers – Peter
Hi Eric,
So in the sail locker you used T-extrusion as well as or instead of plate knees?
Also did you insulate the sail locker and is it fully ‘bulkheaded’ from the chain locker.
Regards – Peter
Peter,
In the sail compartment, the deck beam is heavily welded into the frame and the corner is braced with a T-extrusion. Those are about 500mm long, it is not going to move.
The sail locker is not insulated, and neither is the lazarette. There is no need. If it is cold forward, I just close the watertight door.
The chain locker is “outside” and fully separated from the sail compartment. The bottom of the chain locker is sloped and above the waterline.
Regards,
Eric
Eric,
Under what conditions would the deployment of an oiled or dry sea anchor be appropriate?
Calvin,
It is a tricky question because it is difficult to generalise for every boat, but as far as I am concerned, none unless the boat is unmanageable and then this in itself prompts a few questions, like “what are you doing there in this tub?!”
Deploying a sea anchor by the bow is catastrophic. In true heavy weather it won’t prevent a boat from yawing widely and it is only a matter of time before it gets hammered on the beam, severely damaged and/or capsized. Even if you happen to take a hit square on, you can smash your rudder. A sea anchor deployed this way is also unretrievable and it will soon let go one way or another. The potential loads are almost unlimited.
On the other hand, if you sail upwind, you benefit from dynamic course stability and it does an excellent job of holding the angle between the boat and the sea around a safe value, including in horrendous sea conditions. I sailed upwind under self-steering vane in seas where I would have been washed clean off the deck if I had tried to go outside.
Downwind, if course stability is a concern, I find that sheeting a storm job in flat forward can do a remarkable job of assisting the helm without contributing to much propulsion and I will much rather do that than backing myself in a corner by deploying something off the stern that is almost impossible to retrieve afterwards again.
Now, this stands for decent, capable sailing yachts. There are designs that can’t point while also being completely unsteerable downwind and, in this case, the best is still to leave them somewhere on a mooring. Some boats are death traps in true heavy weather and I would much rather be on something small, but capable, rather than much bigger and useless.
The whole sea anchor saga originates back from the days when boats couldn’t be sailed either up or downwind past a point due to limitations that were inherent to design and/or the strength-to-weight ratio of the materials available for construction. A modern, capable yacht will literally sail in any weather. The sloop Yarra sailed upwind in conditions where it was impossible to stand on deck and gained ground.
So I won’t have sea anchors on board and I won’t have anything to do with them. They are dangerous. I don’t believe there is anything like a passive solution where the skipper and crew can give up and it will all get taken care of by a “trick”.
If I ever found a reason to tow something, like for stabilising a damaged boat downwind, then there would be enough chain and warp on board to rig something up.
Weather-related accidents happen mostly when people stop sailing the boats, stop actively making decisions to manage the situation. What the “excuse” is doesn’t matter. There is no excuse.
The further you go out there, the more capable you need to be to face what might happen. I always advise people to head out and sail their boats in storm force conditions in their home waters until they can handle the boat and the weather confidently.
The first thing they discover is that a lot of things on board they thought were fine stop working when conditions get above a limit.
Most cruising boats today are poorly set up. They are crippled by excessive windage and the sail handling gear is not up to functioning properly in storm force winds, because people succumb to the lure of “convenience”.
The use of electric autopilots is suicidal. You never need your self-steering gear more than when it is dangerous to be outside and it must work perfectly and relentlessly for as long as required. It can be days.
I can sail indefinitely in heavy weather as a single-hander, without getting exceedingly tired or worn-out, simply because the boat doesn’t need me to keep sailing. This means I can rest, cook and keep evaluating the conditions. I only go outside if something needs to be done.
Best regards,
Eric
Thanks for the detailed and extensive reply. Due to my daughter having bought a Montegomery 15 foot, a supposedly off shore cruiser, a type, that unbelievably, someone has sailed to Hawaii from California, and I, personally having minimal experience at sailing. I decided to spend more than a few hours “Googling” up sailboat sinkings.
The results show the following: capsizing and demasting, rudders destroyed or ripped off, keels torn off, hitting “something floating” in the sea or lake, whale strikes, barely submerged land formations, or coral reefs, collisions with other shipping, being blown ashore onto rocks or a beach… most of the previous usually the result of sailing in bad weather on seas or lakes often with surprisingly mild wave action… most of these incidents, unfortunately, cause a hole to form below the waterline. This apparently occurring whether the crew is experienced or not.
If injuries, deaths and lost at sea incidents due to equipment failure, fires, fatigue, or rogue waves, and structural fatigue – disintegration are added to this mix, then the whole idea of ocean sailing fills me with the realization that despite someone becoming a skilled and knowledgeable sailor and spending the time and expense of acquiring or building a first rate sailing ship… You are risking your life everytime you leave for a voyage or cruise. The time you have spent sharing your knowledge and experience with all of us is appreciated.
Calvin,
Crossing an ocean with a small yacht (I will come back on the definition of “small” a little further below) and decent seamanship skills, is immensely safer than spending the same amount of time driving…
Serious incidents are not that common, and incidents that were not the result of incompetence, poor decision-making or plain mistakes in the first place are the rarest occurrence. You are much more in control of your destiny alone on a small yacht in mid-ocean than living ashore. The difference is more that there is no one to help you and you need to be self-reliant.
In recent years, the frequency (and variety) of incidents certainly has increased, partly because there are more people on the water, but more importantly because capability and competency levels have dropped, sometimes down to ridiculous levels. We now have a broad category of cruisers who are so scared of encountering any weather on passage (the “weather window guys”) that they will routinely motor offshore for days or more just to try and get to the other side as fast as possible, before their window “expires”.
Motoring offshore is stupid in the first place (you expend fuel and produce heat and noise where simply taking a little more time would get you there anyway), but it also comes with fairly significant failure and fire risks. Those risks materialise far from infrequently in terms of engine/transmission failure (then no engine any more when you reach the coast and might actually find a good use for it), occasionally it triggers the precursor of a fire (gear shifting with motion, unusually hot parts due to abnormally long running) and now and then a boat gets engulfed in flames for good (usually when fuel gets out) with no remedy.
Those are not bad things that just happen (as some like to suggest it), it is the result of stupidity and incompetence. This is quite avoidable and it doesn’t make offshore sailing dangerous; it just makes stupidity and incompetence dangerous.
Now, when it comes to boat sizes and the definition of “offshore”, anyone claiming that a 15-footer is an “offshore cruiser” in the blue water sense would need to be a moron. Sorry. If you elect to understand it as “a little off the coast in good weather”, then ok, I will take it back.
Boats get knocked around increasingly easily in the sea as they get smaller and lighter because they have less and less stability and inertia and the amount of energy required to throw them around becomes smaller and smaller. In the meanwhile, they are still required to deal with the exact same sea…
If you try sailing even just the Trade Winds with 25 knots of breeze and a 3-metre sea, in what is little more than a decked dinghy, you might get rolled by a crest and capsize in what is nothing but beautiful sailing weather… to others.
The smallest capable boats that truly sailed (not just survived) offshore in predominantly good weather regions seem to fall around the 20′ mark, such John Guzzwell’s Trekka (his book is a classic) and were of sound design and construction. For all latitudes, all weather cruising, the Yarra at 30′ and 4.5 tonnes loaded still proved to be adequate every time, but I honestly wouldn’t recommend going any smaller at all for such sailing.
What you need to keep in mind is that the sailor is the one who has to bridge the gap between the boat in itself and a good outcome. With small boats, this gap gets wider. Small boat sailors tend to be much better seamen than those coming from bigger cruisers, because they have to. They don’t get away with slack practices. They tend to pull through heavy weather unscathed when others don’t, because they have their eyes open and do the right things early. Again, because they need to. Small boats give you an opportunity to learn early, but it might not always come for free. There is a natural selection process: many give up early, the odd one might go missing.
The boat you are referring to is not only way too small for offshore work, but it is also completely inadequate by design. Half of its length is used by the cockpit, the companionway has a very low sill and the washboards are huge. Imagine a wave crest dumping in there. It should have the smallest possible cockpit and entranceway, as much buoyancy as possible and as much stability as possible, i.e. probably a fixed keel.
If your daughter’s intent is indeed sailing offshore, then sailing this boat in fresh conditions in home waters could be a valuable learning exercise. Sailing one from Hawaii to California wouldn’t be impossible for a good sailor, but not particularly wise and some alterations may have been made, like fastening and sealing the lower washboard into place permanently. If circumstances forced me to do so, I would certainly sail a very small keeler across an ocean to get myself out of some situation, but it doesn’t mean that it is a good idea to do it. You are just a little too likely to have “adventures” doing that. There is also a big difference between completing one passage once and regularly sailing offshore: luck always runs out eventually. It is never a good idea to rely on it. Same for weather forecasts.
The Yarra was a Dufour Arpege and this is a boat that can be had for fairly little money these days. They have long finished devaluating. Then you typically need to renew the rigging, tidy up the deck hardware and get some new sails and you have a very capable small ocean cruiser. With a bit of luck, you can find one where this has already been done.
Kind regards,
Eric
Hi Eric,
Are the water tanks under the saloon settees or have you managed to find some ingenious way to store water(fresh of course!) in the bilge. Do you use any of the bilge for storage? And what is hidden under the saloon table?
In another post you claim that much so-called naval architecture is actually more interior design than external hull shape and while you have obviously taken great pains with the latter, you seem also to have paid a great deal of attention to what is – or perhaps isn’t – inside.
Regards – Peter
Peter,
Answering several questions in one go (!), the water tank is in the lower part of the table base, which is made out of 20mm PVC foam core and E-Glass/epoxy inside. It is subdivided into two independent tanks of 75L each and three valves in a U-shaped arrangement allow to couple the tanks or feed the front of the boat separately from the galley etc.
If I want to carry more water, I fit it in 10L square plastic jerrycans in the bilges (which are around 300mm deep around the keel). I always make a very liberal use of seawater on board and an average of 2L/person/day is ample for freshwater.
Carrying drinking water in aluminium tanks is not great. Fresh tank water on board is semi-stagnant, doesn’t have a great oxygen content and the metal doesn’t like it that much after a while. Stainless steel is a much better choice for a metal fresh water tank, but it would have made no sense here as the foam core construction already offered the perfect tank material.
Building fresh water tanks directly into the hull would have been even worse in the sense that now a critical part of the boat would have become very difficult to access and exposed to degradation on the long run. Fuel, on the other hand, is fine straight into the hull provided the tank outlet is at the lowest point (no accumulation of nasty substances), but even then I opted for an independent welded alloy tank. I can fill the keel foil with diesel however, something intended for wintering over in very cold places.
I have paid a great deal of attention inside to ensure there weren’t multiple heads, more bunks than I could ever possibly use, wide open spaces to fall across with little to hang on to, little volume for storage, storage in the wrong places (i.e. huge cockpit lockers), a chart table that can’t take a chart, little screens everywhere… what else? Just about every must have “feature” found these days. This way I got a modern high-performance boat with sensible arrangements and simple functional systems.
Regards,
Eric
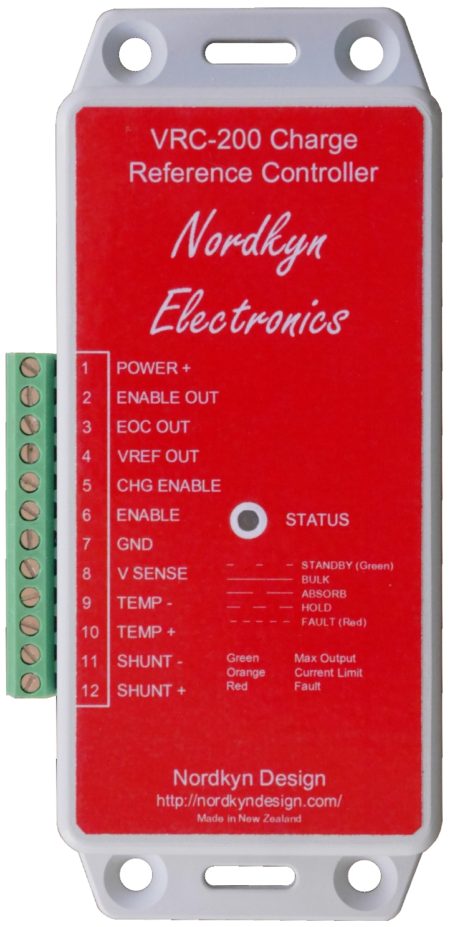
Is there any one or Co. That will repair a CARD?
Gary,
I have had in mind to write an article about repairing them, because they are all bound to fail as I explained, but it has remained an intent. Finding the time…
After completely reverse-engineering mine, I occasionally repair them to help people out, using much more durable components than what is originally in them. They are great and it is a shame they are no longer manufactured.
If you e-mail directly with some details and your location, we can talk about it.
Best regards,
Eric
Hi Eric,
Looking at that last photo above I’m wondering how you get on going forward in a blow? The coachroof handrail stops beside the chain plates and then there’s nothing to hang on to between the forward lowers and the pulpit.
And I’m intrigued by your flush chain locker hatch. Is that a hole for the rode and therefore is the locker self-draining?
Thanks – Peter
Peter,
You just follow the lifelines on the windward side after the forward lowers and keep low down. The lifelines are 600mm high and the deck has a substantial toe rail. I didn’t want to extend the handrails into the walking areas, they become very dangerous trip hazards.
The chain locker is self-draining indeed and the anchor comes off the windlass and goes inside the locker if any weather can be expected, so the chain needs a way to make it into the flush deck hatch. There is a plywood/glass epoxy sole inside to keep the chain away from the aluminium and help with spreading the weight.
Regards,
Eric
Hi Eric,
Can you describe Nordkyn’s windlass?
Thanks – Peter
Peter,
It is a Muir HM1200 set up to run 12 or 13mm DIN766 chain (both have the same pitch). It had gone out of production when I wanted it, but the folks at Muir’s in Tasmania were most obliging and gave me an address in South Australia where I was able to find one and then they provided me with the gypsy I needed.
Eric
Mine is getting power but will not turn on. I do not know if it is the electronic box or the dome on the back rail. We are on Lake Erie. I can do some rudimentary testing if I would know what to check.
Yikes! What is under the waterline? !!
PLEASE give us a picture of the boat out of the water!
Tremendous article on sailing dynamics, but need to see boat parts relative position to each other.
Thank you,
Robert.
Robert,
There are some pretty reasonable photos of the underwater body here!
Best regards,
Eric
Gary,
The power supply is contained within the display unit and then there is quite a bit more electronics in the dome. Unlike the dome, the display is very easy to take apart, so the first thing you should check is whether the supply makes it past the on/off switch on the sensitivity potentiometer on the board. Bridge over the switch to test if needed.
Getting the green centre LED to come on should be very easy, because it has nothing to do with the more complex circuitry inside the dome. Until then, you can pretty safely assume that the dome doesn’t have power either. I have close up photographs of both circuit boards in my files, I will have a look for you tonight.
Regards,
Eric
Eric,
I have a C.A.R.D. system installed but not functioning any more.
Questions:
– Is there anything else equivalent on the market?
– Can it be repaired?
It turns on, one of the direction arrow does not light up.
It does not receive any more it seems as it does not see my own radar.
Since you have reverse engineered it it seems better use of my time to get your help then doing it myself.
Hi Eric,
Can you describe Nordkyn’s foresail list and perhaps discuss how and when you use these sails?
I wonder did you ever consider or use reefing jibs a la Moitessier?
Cheers – Peter
P.S. Storm trysail?
Peter,
It has got a working genoa, a #1 jib, a #2 jib and a storm jib, all cut as tall blades. I reduce forward before reefing the main, it gives the best results. I have used reefing jibs on small boats many, many years ago and they worked ok. Here the bottom of the sail would be pretty stiff and heavy to gather up and I don’t think it would work too well. I was also going to make a maximum genoa, maybe out of Custom Axis Laminate, for the really light weather, but I have essentially dropped this idea. The working genoa reaches so far down in the wind range that there is no justification left. Then at the slightest increase in true wind speed upwind, the apparent wind augments so quickly that not wrecking that light sail would be an on-going concern.
I have an asymmetric kite and a full kite. Initially, I thought the asymmetric would cover all my downwind needs by gybing between tacks. It doesn’t always work that way and I added a full spinnaker for the angles between 135deg and 180deg apparent. Spinnakers are fantastic light weather cruising sails. I crossed most of the South Atlantic under spinnakers and the longest I flew one without dropping it was 5 days and 5 nights, then I took it down ahead of a squall before putting it back up for another 2 days.
Trying to play with a trysail (even more so short-handed) is first and foremost a good way to get yourself thrown overboard. Why would you attempt to hoist a crazy, unsupported piece of canvas trying to smash everything to pieces in a gale or worse, when you can deep-reef your fully-battened main that is already up without it even flapping once?! As long as you have a strong main and the reefing arrangements are bulletproof, the whole trysail concept is utterly senseless today.
However, a strong main is heavy. Nordkyn’s mainsail weighs over 70kg. I pull it up to the second spreaders and then I have to winch the last 5-6 metres. If you start going lightweight, use high modulus fibres or try to roll the sail using some nonsensical contraption, chances are that it is not going to dependable in high winds. At that point people start talking about trysails again: well, cascading two bad choices doesn’t make a solution, unfortunately.
And it keeps getting worse the more you look into it, because trysails are very poor at pointing the bow high and it is exactly what you want in bad weather. I can do that instantly with a deep-reefed main.
So no trysail, ever. As the boat can sail at any wind angle under either of the two sails, it doesn’t even make any sense as a backup of sorts. I would rather carry a whole spare main as I did on the Yarra, this at least you end up using sooner or later!
Regards,
Eric
Hi Eric,
Very surprised to hear you are a spinnaker fan – many cruising folk seem to regard them as instruments of Satan!
So, are yours full-size and lightweight as on a race boat or have you got a more robust and sensibly-sized set-up.
And most important of all, how does Herr Forthmann’s self-steerer handle them? (I’m not seeking a product recommendation here but just like anchoring, there is a soviet of opinion out there about what works best and I would only expect you to comment as to how yours works on your boat).
Cheers – Peter
Peter,
Spinnakers are some of the most essential cruising sails. They make all the difference between rolling around in the sea going nowhere, and tracking at a steady few knots on a stable boat. Mine are full-size of course – you need them when no other sail is working, not to “go faster” in good winds – and of moderate weight. They become too prone to damage and tearing if you make them ridiculously thin. One thing I regularly do in very light weather is replacing the sheet with a small, very light weight line, 3-4mm; the weight of the sheet can otherwise be enough to prevent them from taking their flying shape.
You also need to understand kites to use them for cruising. Occasionally, downwind or on a broad reach, you can collapse it and then the boat catches up with it and it tries to wrap itself around the forestay. Momentarily gybing the main and flying the spinnaker “backwards”, filling from the leech, causes it to unwrap itself (with a little help from the foredeck if necessary) and you just recover, throw the mainsail back across and carry on.
The Windpilot vane handles them fine, including in very light conditions, even downwind. It is a superb piece of engineering and I sailed about 60000NM on one without having to even look at the pendulum main bushings. Steering vanes don’t like large variations in apparent wind very much. The most challenging wind angle under spinnaker tends to be beam-reaching: the boat accelerates, bears away and then suddenly slows down, collapsing the kite. Preventing the slow-down, which is caused by over-steering, is the trick. At times, it can still go wrong now and then, but you just manage it. Alternatively, it overpowers the vane while accelerating, rounds up and then things get very noisy up there.
There are quite a few things you can do with a Windpilot to change its sensitivity and response and, over time, you become quite skilled at setting it up. Most of the time, it is a no-brainer. If it gets challenging, the first thing you need to determine is whether the vane is over-steering or under-steering the boat. With kites on a beam reach, it is quite tricky because it can over-steer bearing away and then under-steer luffing back up.
On the Yarra, which always had at least a little weather helm except dead downwind, the vane nearly always pulled the tiller to windward. The leeward steering line could be quite slack. Nordkyn is a very different beast. It is very light at the helm and requires more precise steering to keep its speed up. The vane needs to be able to luff it up quite readily and it requires as little play as possible in the steering lines. It also creates a lot more apparent wind and can be more challenging on the run, going from 11 knots to 18 knots and back down, but nothing that can’t be managed.
I don’t carry any electric pilot at all. It could certainly be “useful” in some conditions, but I can’t see the point of having to put up with the cost, installation issues, reliability and maintenance aspects that come with it for virtually zero usage. If there really is no wind, I am happy to find something else to do and wait for it; if there is some, then I always manage to get the vane to steer somehow.
The vane is the most important piece of equipment on board. It holds the boat 24/7 in all weathers, including when it is too dangerous to hang around outside. This in turn allows me to rest and look after everything else on board, because I am not needed at the helm, and I can keep doing this indefinitely.
Regards,
Eric
Hi Eric,
Are the coachroof control lines port: spinnaker pole and starboard: boom? And does the topping lift exit the mast adjacent the main halyard?
Also, I can’t see any pole chocks on deck but note the pole heel track on the mast reaching to just below the lower spreaders. Do you stow the pole up the mast and if so, how do you square that with your desire to minimize top hamper?
Regards – Peter
Peter,
Yes, the spinnaker gear is on the port side, while the mainsheet and boom vang come back to starboard. There is no topping lift, the vang supports the boom. It saves one operation as well as little “accidents” when reefing. At the masthead, there are two sheaves side-by-side and the position for the topping lift is allocated to a spare mainsail halyard. They run exactly the same. There is also a spare jib halyard.
The spinnaker pole is hooked onto the pulpit forward and lashed at the chainplates. It works fine. It can be stowed up along the mast indeed, it is just that I finished rigging up this arrangement quite some time after the photos were taken. There is a little more gear to enable that now. Many photos are construction era or a little post-launching.
I prefer seeing the pole down on deck where it doesn’t contribute to windage and weight aloft, but being able to hoist it and stow it along the mast is useful when I am actively using the spinnaker gear, or use it to pole out the genoa. It saves manhandling what can be quite a dangerous instrument and you can use the long track to sometimes “push” the sail out by lowering the pole in a controlled way with the outboard end already attached to the sheet.
Some of the things I could do on the Yarra are no longer possible or safe at all on a bigger boat, so I sometimes had to come up with new tricks.
Best regards,
Eric
Hi Eric,
How did you fasten the winch bases and other deck fittings, particularly with regard to corrosion?
Thanks – Peter
Peter,
They are all through-bolted in stainless steel, but sitting on plastic pads with sealant. The bolts are bushed and insulated from the alloy. Worst thing you can do is tapping into the aluminium: after a few years, you will shear the bolt trying to turn it.
When access from the inside was going to be a problem afterwards, I sometimes installed insulated stainless plates inside and bolts go into this.
Regards,
Eric
Thanks for that Eric but I’m not clear about that last sentence. Do you mean you tapped the holes in the attachment plates and threaded the bolts into them?
Cheers – Peter
Peter,
In some instances, I spot welded stainless nuts onto the plate, because I didn’t want to make the whole plate that thick and heavy. When it was M6 only, then I tapped into the stainless indeed.
Regards,
Eric
Hi Eric,
How much of the development time was spent evaluating and testing keel bulb options? Nordkyn’s reminds me very much of the few published photos of post-12metre AC boats. And did you have to spend much time choosing a foil section?
Thanks – Peter
Peter,
Keel bulbs: a bit. There are design trade-offs with bulbs. Long and skinny gives more wetted surface and less pressure resistance up to a point, but the advantage is more prominent at high speed. Designing for high-speed has been the downfall of many racing yachts, because it easily makes them poor in all the more common conditions where high speeds can’t be obtained: not enough wind etc.
Flattening the bulb allows lowering the centre of gravity a little further for the same draft, at the expense of a slight increase in wetted surface.
Bulbs should also have their maximum girth as far back as practical. Maintaining a positive pressure gradient for as long as possible helps with delaying boundary layer transition (in other words, more of the bulb keeps operating in the laminar flow region) and it lowers the drag.
Without the option of using ballast material heavier than lead, I needed a volume of around 220L in it. I considered various options and I ended up modifying a NACA 66-series profile.
Today I would run some CFD on it, but that wasn’t an option for me back around 2004 when the keel was designed.
I spent a fair amount of time working on the foil. The racing crowd wants keels as thin as possible: the drag reduction is ridiculously small; the strength reduction, on the other hand, is huge. Narrow keels also stall very easily. A thicker foil doesn’t hurt the design much, is much stronger structurally and can keep operating well in conditions much less favourable.
I found that I usually outpoint other boats and I don’t seem to suffer from a speed penalty. Last year, between Christmas and New Year, I was sailing upwind in light weather towards Cape Colville on my way to White Island when one of those racing crews with Kevlar sails decided to take me on. I watched them battle for an hour, tuning and sitting on the weather rail. I was having a cup of tea and the Windpilot was steering. When they were pointing as high as I did, they were falling further behind and when they matched my speed, they were falling to leeward. I was steadily pulling further away effortlessly. They couldn’t do anything about it. In the end, they threw a tack and disappeared towards Great Barrier.
Foil sections must be chosen for the anticipated leeway angle, which itself depends a lot on the foil area and there are quite a lot of things to think about. My VPP code was extremely valuable to assess the various trade-offs as I had access to all the data from the keel model.
Assuming that the boat will always be going fast is just wishful thinking and a mistake again in most cases. Unless you design a machine with enormous sail area/displacement and sail area/wetted surface ratios, it doesn’t really happen and the water is not always flat. When you are ocean cruising in difficult conditions, a bad keel can stall/fail to produce lift when you need it the most and put you on the shore. It is silly to try and cut it right at the limit.
The keel design must however be slippery and able to handle a lot of speed without any issues, otherwise it can pitch the bow down with disastrous results on the run.
Like with hull shape, the keel design is one of those areas where you can make big decisions and take risks one way or another and you are going to get feedback about what you have done once on the water.
Regards,
Eric
Hi Eric,
How did you fasten the composite bulkheads to the adjacent ring frames? And what are the ‘dots’ around the margins?
Thanks – Peter
Peter,
They are both bonded to the aluminium with urethane and through-bolted all around. The core was removed around the bolts, so the skins could be brought together and the glass thickness increased. The bolts were fully tightened only after the urethane had fully cured.
Eric
Hi Eric,
Judging from the ‘profile’ photo heading the post “Too Fast On The Run”, there seems to be more side-deck camber adjacent the mast-shroud region. Or is it constant and what I see is the consequence of the modest sheer in Nordkyn’s profile.
Thanks – Peter
Peter,
That photo was taken from an inflatable dinghy from memory and the low view point combined with the hull beam is causing the sheer to look flatter than it is. Compare it with those on this page for example, especially the second one.
The other thing to remember is that the deck edge is quite curved, while the line where the roof meets the deck is much straighter. The location of the jib sheet track is what determined the width of the roof forward and the sheeting angle is comparable to a racing yacht, no compromise there. What you see is the side deck getting wider.
Regards,
Eric
Hi Eric,
Did you peel ply/vacuum-bag entire composite panels or simply roller epoxy into the roving and fill it after, before cutting them into parts and can you reveal the reason for the use of the brown(mostly vertical) panels and the green (mostly horizontal) panels?
Also, what sort of weight-saving did you achieve using composite panels instead of ply?
Thanks – Peter
Hi Eric,
Did the top of the keel bulb create a sufficient end-plate effect to allow you to use a constant section in the foil?
Thanks – Peter
Peter,
Yes, I used a constant section. I didn’t need volume in the lower part because of the bulb, so strength at the root and hydrodynamic considerations are what decided its shape. The hydrodynamic effect of bulbs upwind is not obvious. You really need to shape them like a small horizontal slab or add wings to them to (hopefully) get an end-plate effect and then you also incur the additional wetted surface. It is easy to end up worse off. The value of the bulb is found in terms of stability and reduced ballast.
Eric
Peter,
When I started, I was able to source Klegecell PVC core, which was brown. Later, the supplier only stocked the higher grade green Divinycell.
I cut the foam to shape first and checked the fit in the boat, then glassed both sides of the panels on a large flat table. The best tool for working the resin on flat surfaces is simply a large putty knife. Rollers are slow, messy and difficult to clean afterwards. The pressure from a flat blade lets you press the glass down onto the resin and it gives a strong, resin-lean laminate.
Each panel was then glued into place and only the corners were shaped and glassed in place.
I saved hundreds of kilograms when compared to a marine plywood fit-out. The fit-out is one of the few places where you can really save substantial amounts of weight. Building light is more labour-intensive and more costly, but you benefit from it forever after.
There is a very light marine plywood called Goldcore Light you can get now. It is not as light as a foam core panel, but it is way ahead of the traditional marine ply as far as weight goes.
Regards,
Eric
Hi Eric,
Looking at the cockpit photos above, can I see a drain hole in the port rear corner (I realise there are crossed drains forward) and where do the outboard sloping seats drain?
In other photos I can see holes in the transom(gas bottle compartment drain?) and under the counter(exhaust?). And what about water intake and outlets? Where have you placed them and what sort of shut-offs did you use?
Thanks – Peter
Peter,
The seats drain back into the bottom of the cockpit, the drains are just there to remove the small amount of water that would otherwise remain in the corner of the seats. If you look into the aft cabins, the forward drain tubes act as handholds for moving in and out of the double berths.
There are four cockpit drains, one in each corner, so the cockpit sole doesn’t need to be sloped. None of them are crossed, there is no need for that: when the boat heels, the whole cockpit rises further up from the water. The drains are plumbed back through the hull bottom aft, above the static waterline.
The two outlets you noticed in the transom are associated with the bilge pumping system. There is one pump down-below and one that can be operated from the cockpit.
There are two sea water inlets, one for the engine and one forward feeding the salt water circuit on board. The engine one is always kept shut when not in use. The galley sink has one outlet and the heads have another forward.
I used Hansen fittings throughout for valves and skin fittings. They are very tough and completely impervious to corrosion.
Best regards,
Eric
Thanks Eric,
Can you talk a bit more about the bilge pump system? Are both pumps manual and/or do you have a motor-driven pump as well or indeed electric ones in the bilges.
There’s a photo in the Interior Construction post showing what looks like an in-line electrical
pump in the bilge adjacent the galley sink – or is it a valve of some sort?
Have you incorporated the gas bottle locker drain into the cockpit drain system and where have you run the engine exhaust?
Cheers – Peter
Peter,
Bilge pumping systems are another one of those things that sound important, but are of limited usefulness in the end. They are only good for removing small amounts of water and effectively finishing the job. If you have that much water in a boat that you need to do something drastic about it, you won’t be turning towards a bilge pump with a 38mm hose.
This being said, there are two manual, double-acting bilge pumps in the system, two Y-valves and shut-off valves at the watertight bulkheads and it is possible to pump the two forward compartments even if they have been sealed off at the doors.
In addition to this, I can divert the engine water intake to a hose inside the boat using a valve and use this to pump out as well. It is also useful for flushing the raw water side of the cooling system, etc.
There is also a third bilge pump operating the Lavac head forward and something could certainly be done with it if ever relevant.
I don’t have any motorised pumps. Not only they would never be of any use, but they probably wouldn’t work any more if I ever wanted to use them – short of putting them onto some strict testing and maintenance schedule, like flooding the bilge deliberately and pumping it out twice a year. I am not very interested in doing that.
Driving a lay-shaft from the engine and coupling a mains alternator, a large capacity pump, a waterblasting pump, etc are all thoughts that had crossed my mind long ago, before I had sailed any long distances. In the end, it is just a lot of weight and complications for systems and equipment that hardly ever (or simply never) see any use and nevertheless deteriorate. I don’t need the deadweight and constant penalty going with it.
It is a metal boat with a fully welded hull and the bilges are naturally dry…
The LPG locker is part of the lazarette and is vented outside by itself. The engine exhaust runs into a water trap, through the watertight bulkhead behind the engine, up underneath the deck and then comes back down and through the hull, well above the waterline.
Best regards,
Eric
That’s a lovely boat but I would have an unfortunate compulsion to put a lot of wood in the interior. I would like to have a look at a scale side view showing all the important bits relative to each other such as mast, keel and rudder mainly and if possible (if easily available to look at somewhere) the position info for COE, CLR and CG marked on the side view perhaps or maybe as a % of lwl in the boats ‘ready to go sailing without too much extra stuff on board’ setup.
Best regards, Paul.
Paul,
As long as it is veneer on top of something light, you could just suit yourself. This is the way the table top is constructed by the way.
The profile and the position of all the centres would certainly be tremendously interesting information, but this was a project with a R&D component and it should be quite easy to understand that it is confidential design information.
Kind regards,
Eric
Hi Eric,
Was the ‘premature’ installation of Nordkyn’s engine a deliberate decision to ignore the ‘Just-In-Time’ principle in favour of other considerations? If so, what were they?
Thanks – Peter
Peter,
There were no other considerations than a degree of convenience, but the drawback of ending up with no warranty was never perceived or anticipated either at the time. In the end, it never made any difference: the engine has a little more than 100 hours on the clock now, but it also took over 5 years to get there. In this context, you can see that the “1 year from start up or first 100 hours, whichever comes first” warranty statement is in fact of very little value… in my case, such a warranty is bound to expire before I get any chance to test it.
The net effect here was that it turned out to my advantage:
1/ I saved paying the agent for coming down, inspecting the setup and starting up the engine for the first time, as he didn’t want to know about it any more and this represented a lot more than the value of deferring the purchase by say 3 years.
2/ I was able to start up my engine myself, and I did so with a lot more care than what agents often take. When you have to do those things all the time, it is easy to get a little too casual with them.
Having the engine available early was convenient in terms of lining it up and adjusting the shimming and the exact space available in front of it. Today, things are somewhat nicer because you can get 3D CAD engine models from the manufacturers and literally install the engine into the drawing with every detail included. This is what I always do these days, but, at the time, I had to work with a profile only.
Hindsight is also a wonderful thing and today I would most certainly buy it almost at the last minute only, after having completed everything outside and all of the interior construction as well.
Regards,
Eric
Hi Eric,
Looking at the two photos above of the foredeck (and others showing the forebody from below), it’s clear that Nordkyn is full-sectioned forward above the waterline and yet you claim she has a “fine entry”. How do you define that term given that her forward waterlines can’t be that “sharp”?
And what’s with fine entries anyway? Are they proven to offer less resistance over a vessel’s entire speed range or do they only come into their own at higher speeds?
Cheers – Peter
Peter,
The hull certainly looks fuller forward at deck level for sure, but at the waterline, you can draw a near straight line a long way back from the bow and the waterline beam is noticeably narrower than the hull beam, so the hull is quite fine forward in most circumstances. What I didn’t want was a lack of volume forward leading to burying the bow because it is dangerous.
An interesting study was carried out at Delft Technical University to quantify the relation between the added resistance in waves vs the risk of burying the bow. It showed that more volume further up into the topsides added a little extra resistance in waves indeed, but – more importantly – it also significantly reduced the risk of driving the foredeck under.
The flare in the topsides of this hull forward does a spectacular job of keeping the deck dry when punching.
A fine entry is useful for as long as the hull operates in pure displacement mode, i.e. it doesn’t try to lift and plane. If the idea is getting the boat on the plane, then lightweight is everything and the hull entry is commonly a lot more blunt, because maintaining a lot of buoyancy forward is essential when hitting waves at high speeds.
Nordkyn is an ocean cruising yacht and is not that light. It used to be quite light in the early days when a lot of gear hadn’t yet made its way on board and would lift the bow and try to get on the plane quite easily, breaking the water at the mast in some occasions. It takes a bit to get used to it in the beginning.
Now, in ocean cruising trim, this doesn’t happen any more. The interesting part is that I still hit the same top speeds, but the hull works differently and stays trimmed flat.
This has in fact been so interesting that it became the topic of a research project to create extremely fast and economical pure displacement hull forms for applications like fishing or cruising launches – but this is another story I will almost certainly write about at some point in the future.
Best regards,
Eric
I’m confused, are you saying you saw munros presto lines in nz or are you talking about the early nz boats?
Guy,
Yes, I am saying I saw frames for Munro’s Presto design in New Zealand. The boat was not built and I am not aware of any true Presto ever built in New Zealand.
Best regards,
Eric
It is a magic process! Thanks for your share and explanation of how to plating aluminum alloy plate.
I am a shipyard designer and eager to have a boat of my own. And working with steel ship during my whole working life, I have no idea to construct an aluminum alloy boat,especially for forming compound curvature. So these days I had read lots of articles about working with AL alloy, and then it is an encounter of your essay.It is a shining guideline for my coming personal project.
whats more,I would like to express my collections which also need to be proved practically.
1. laying off the hull shell with one curve direction of the dual curvature. And the only thing to do is to wheel along another curve direction. (it is proved, from the steel boat hull design book)
2.heating the AL alloy until 100-200¡æ,and its elongation increases and it is easier to work.And I think it is also suitable to other AL alloy. But I have no way to check the right 5083-H112(or other types,like 6061-T651) metal phase diagram and the authoritative experimental date. (to be proved,from a repair manual of Porsche)
Thanks to your share and look forward to receiving your reply.
Dear Xinpan,
My apologies for not replying earlier, your message was unfairly caught by the spam filter. I have just found it now.
When it comes to forming perfect compound curves in aluminium, it is quite difficult unless you have a very good wheeling machine and you can work freely in all directions. This is not a real problem however. I found that the most important curve to shape in the plate is the short one following the frames, because the material is far too strong and stiff to be pulled into shape. Once you have the correct shape for the frames everywhere, you can clamp the plate against the framing from its ends and it might only touch some frames in the middle. When you start welding it under tension where it contacts the frames, it yields a little and the “ends” start coming down naturally, so you can reclamp it tight again and keep welding. It just gradually gets into place.
If an edge buckles a bit (which can happen, because you were unable to stretch the centre of the plate enough), put a saw cut into it to allow it to collapse back to flat and then weld the cut later. These cuts are typically only 100-200mm long from the edge and not needed very often. In most instances, when you fully weld the seams later, stresses in the plate edges get relieved.
The other piece of advice I would have is plating everything that is easy first. It leaves much smaller plates in the areas where there is a lot of compound curvature and small plates are a lot easier to work with.
I don’t think heating 5083-H321 plate would make much difference or help, unless you heat it a lot of course. In this case it loses a lot of its strength and you don’t want that at all. The same applies to the heat-treated 6000-series alloys and T6 is especially strong. Softening it is not the objective. You need to cold-form everything and control the heat when you weld it to preserve the strength of the metal. I never heated any plates and I would never to it.
Forming a round bilge hull is a gentle, gradual process. It never involves applying huge forces. If it gets too hard, you need to stop, think and find a better way. You are doing something wrong. It is not as difficult as it looks and you need to make the material and welding all work for you and help you. If you try fighting the material, you will usually lose because these grades for marine construction are extremely stiff and strong.
Kind regards,
Eric
Hello Eric.
Thank you for this site, for the information about the design and build of Nordkyn and for your technical articles. I’ve enjoyed reading through almost all, along with the comments, which you are most generous in replying to. I do wonder if you provide commentary elsewhere on the web; I would go looking if you did.
I’m in the process of building my knowledge on yacht design and approaches to sailing, with the prospect of heading out cruising with my wife when we’re both retired in a couple of years. I’m intrigued by the similarity of a couple of recent yacht designs to that of Nordkyn, as far as my inexperienced eye can tell, that is. These are the Hallberg Rassy 44 and in particular, the Garcia Exploration 45. If you are in a position to offer comment on those designs, relative to Nordkyn or as stand-alone assessments, I would find that to be most interesting and helpful for my education. They are on my shopping list, but might have to fall off, for funding reasons. Which makes me think – do you know what Nordkyn ended up costing and what might a new build come in at, approximately?
Thanks for your input, if you are indeed able to engage.
Regards, Rick.
Dear Rick,
First of all, my deepest apologies for not replying earlier. Your message was caught by the spam filter and went unnoticed until now.
I don’t partake in too much else on the internet, the lack of time being one reason and the other is that forums are not always very constructive. It is one of the drivers for having this site up.
Those are interesting comparisons. The short answer is that while they seem a little similar, they are not.
The HR44 is 5 tonnes heavier without any more sail area really and the hull shape entirely precludes obtaining the same kind of performance. The buttocks have a lot of curvature located quite far aft and the deepest point is underneath the engine (!) Nordkyn’s hull is deepest in front of the keel, close to the mast step, with a very straight run from there into the stern. Curving the streamlines in the stern region causes a trough to form, the stern to get sucked down at speed. While the HR44 will “cruise” fine with sufficient wind, overall it is a slow, sluggish cruiser in comparison. The deep body and limited draft also mean quite a short keel foil, which won’t do it any favours upwind. The somewhat distorted hull seems to have been designed with an eye on what was going to be possible in terms of interior fit-out, and this is always a very bad start. Boats are sold from the inside-out however, and this is unfortunately what it leads to.
The Garcia 45’s hull is also very curved aft of the keel and much the same comments apply, but it is not as deformed as the HR44. The displacement is about the same again. It is a centerboarder, which means internal ballast, less righting moment and less sail carrying ability. The specs from the yard don’t even quote the sail area.
When Nordkyn heels, about half of the hull comes out of the water and you are suddenly sailing a much narrower boat with a huge righting moment and a small wetted surface. This won’t happen anywhere near the same extent with those hulls, which are quite rounded compared to Nordkyn. Both certainly are from yards that are known for quality of their construction, but I wouldn’t envy either of the boats. I want this ability to get speed out of almost no wind, steer the boat with just one hand on the tiller in nearly any conditions, point so high into the wind that almost no one can follow… I designed the boat for sailing and everything else was secondary, which was not much of an issue because there is plenty of volume in a 13-metre hull. The problems arise when “more becomes better”, when people start comparing the number of berths and the number of heads (!), as if one couldn’t be enough… it becomes silly and the outcome is no longer about sailing at sea.
I reckon that having a Nordkyn 13 built today in a yard might set you back around NZ$1M finished and ready to go in New Zealand, in part because of the inefficiency/high margins of small building yards. A yard using its own in-house marine engineers, electricians, riggers etc should be able to do better and if it had to be competitive it could come down to something like NZ$750K. It should generally be cheaper to build one in NZ than Australia at the moment due to labour rates, but there are some big efficient boatbuilding firms in Australia. Building small craft in Poland is far better than New Zealand these days and this could see prices around €300K. I designed and built that boat because I wanted something I couldn’t otherwise find or get. It only cost me in materials and I was fairly ruthless in sourcing everything. Since I truly enjoyed building it, it was a very good deal, but this meant 5000-6000 hours of labour.
The only areas where you can reduce costs are mark-ups on materials and external labour… and this means doing things yourself basically or building offshore where labour rates are much lower and quality is high.
Kind regards,
Eric
Hi Eric
I am interested to know where you saw the frames for Munro’s Presto Design (just out of curiosity)
I am reminded of a conversation I had with Jack Cropp about hull design and efficiency…he had a reputation for designing fast sailing and fishing boats.
I recently saw a newly built traditional East Coast (of the USA) fishing boat and was struck by its width aft…it reminded me of the Volvo 70’s being used today…I understand that these fishing boats were also (like the Presto) designed to be seaworthy (enough to fish off the coast without motor)
I lack the technical expertise to make a full assessment of these boats…do you have any knowledge of them?
Greetings,
New Zealand Sailor
Roger,
I discovered them in Otatara near Invercargill in 1999. They were in an old shed. Some years later the property was sold and the frames stayed behind. They may still be there today.
Narrow and pinched stern lines were always a mistake, they gave boats that were unable to accelerate in following seas and became unmanageable as waves caught up with them. I never specifically heard about the fishing boats you are referring to, but they may well be related to the Presto hulls. I would expect so due to the geographic location.
I am particularly uninterested in traditional designs in general due to them so often being hydrodynamically senseless, based on misconceptions and ultimately unseaworthy when you take them to the limit (you just can’t sail them any more), but the strength of materials and construction methods constrained what could actually be achieved for a long time. The evolution in design hasn’t just been one based on new ideas and understanding.
In this context, those boats from the US East Coast are quite remarkable, because their design was excellent from a seakeeping point of view at the displacement that was imposed by their traditional construction and they could be built strongly enough. They weren’t designed according to beliefs like almost everything else that went on for almost 100 years on both sides of the Atlantic.
You may remember that when Francis Chichester commissioned the design of Gipsy Moth VI to sail around the world, the brief he gave to the design office represented what would have been an early Open Class racing yacht: “I asked for a scow-shaped hull, that is to say of broad beam, shallow draught, and flattish bottom, with a deep keel”. Such a hull would have been very stable and powerful and most interesting. He was told that he was wrong and the boat he got instead was narrow, deep and also basically a heap of garbage. What a missed opportunity…
I sometimes work on designs with fishermen and commercial operators. It is essential to listen to the people who go and spend time at sea and work the boats. They have interesting things to say. What they believe and the conclusions they draw are one thing, but their raw experience is something that can’t be touched. Looking at the Presto boats, some people clearly had an outstanding grasp of both stability and dynamic seakeeping. These people not only understood marine design and construction, but they also spent plenty of time at sea in bad conditions or they wouldn’t have come up with these hulls.
Kind regards,
Eric
Really impressed with your site and Yacht. I would be interested in the scantlings, plate thicknesses etc. Did you consider leaving the topsides unpainted in the French fashion? Nice looking rig, simple, efficient easily handled be interested in measurements.
The articles are well presented and informative.
I shall watch this site with interest.
Hello Terry,
Thank you for the feedback. I could have mentioned the scantlings in the construction pages… The hull plating is 5mm, the deck 4mm. The plate around the keel and underneath the mast step is 8mm. The frames are 60x60x6mm T extrusions and the floors are mostly made out of 6mm plate.
I am not very fond of the bare aluminium look, especially for the topsides where doing the work once results in a much nicer result forever. The coating seems to suffer more on the deck and leaving this unpainted would make more sense to me than the topsides. Either way, it is a matter of preference, but the bottom has to be painted anyway and fairing it to perfection is also a good idea for hydrodynamic performance.
The mainsail has P=15.5m and E=6.2m with an area of 57m^2. From memory, the foretriangle height is I=16.8m and J=5.5m. The top of the mast is 18.6m above the water. The rig is really easy to handle, I can tack up a narrow channel under sail single-handed without any issues and do just about anything under main alone too. Sail handling takes a bit more time than on smaller boats, but it is fundamentally manageable and sometimes easier than it was on my 30-footer. It is very powerful and really responsive to tuning.
I have been working intensely on projects and not writing much lately. I have had another go at the Wild South concept, but targeting higher speeds and outstanding economy for commercial applications like fishing. That hull would make amazing launches as well from around 13 metres up.
Best regards,
Eric
Hi Eric,
thanks for your reply. Could not agree more about painted decks , do you think tread plate would provide sufficient non skid properties? or I would even accept the weight penalty of teak overlay.
Having faired a 12m hull and decks once before, cutting down on the amount of fairing by 70% has a lot of attraction.
I agree with your concept of hull form, so many have been previously driven by rating rules and the distortions they encouraged and heeled waterlines. A moderate beamed hull with clean lines is going to give a faster passage time especially when short handed rather than a super beamy harbour racer that needy constant tweaking and a football team on the rail. High averages and good windward ability are high on my list.
Your rig looks pretty bullet proof and easily handled, what section did you use?
Good luck with the Wild South project.
Cheers,
Terry
Terry,
Alloy thread plate is a horrible material, very abrasive, very aggressive (try walking bare feet on new thread plate) and to make things worse it is usually not available in heat-treated marine grades, so it is lacking strength and it is not as corrosion-resistant either. It buckles and dents very easily. My deck is covered with TBS non-skid. Even if I decided to leave it unpainted, I would still paint the walking surfaces and glue TBS on it for the non-skid and cushioning properties it has (or use some recoatable non-skid paint). What would benefit from staying unpainted (up to a point, maybe) is the toe rail, and definitely the areas around the chainplates. Now, I would anodise all my chainplates before bushing them in stainless steel and welding them in and I would keep the paint completely away from them. The presence of the stainless steel causes localised blistering. Putting wood on top of metal would be asking for serious trouble down the track. Aluminium pits very quickly in the presence of trapped moisture. Sooner or later, water will get underneath the teak and you won’t know it until it is too late.
For me, fairing was nowhere near as bad a job as people seem to think. I used long boards with 40-grit paper and cut into the filler really quickly and efficiently. Of course, there is additional work painting before and after filling and preparing the surface for the topcoat, but it only needs done once. There is an initial time and cost saving in not painting, but it is probably more a matter of preference than an absolutely clear-cut decision.
The mast section is a Selden C264. Interestingly enough, I could only find two suitable production mast sections for this boat. The combination of the height and high righting moment from the deep bulb keel made it quite challenging. Determining which section to use is a bit of a process in itself and it is driven by the stability curve and staying arrangements.
If you look at recent production cruising hull forms, with a blended chine, very wide stern etc, they are only different in the topsides. The designers had to fit these “features” in while trying not to screw up the hull. They haven’t changed underwater. The stern is only wide at deck level, the bottom is in fact quite curved and narrow aft to stay away from drag, balance and bad behaviour problems. Increasing the stern beam increases the deck area and weight aft, where it is rather unwanted, so it is quite silly to try and “follow the trend” here.
The ones that carry a lot of waterline beam aft have to go to twin rudders and incur the penalty of a higher wetted surface until they can heel (if they are also very flat, and therefore light). When they heel, they immerse the corner of the transom, which is not desirable. Lowering the transom down to the water generally is a bad design idea. It adds to the wetted surface at all speeds (very bad in light winds), adds drag at all but very high speeds and still gives no more waterline length at relevant speeds. To make this work, you need to be able to almost guarantee that the boat will be sailing extremely fast all the time. In practice, it just doesn’t happen. The overall result in cruising conditions is slower, sometimes also in racing conditions.
Passage time really is a function of how slow you don’t go, not how fast you can go. On Nordkyn, the mileage comes from the ability to still do 6 knots in very light conditions. It becomes 4-5 knots faster than the 1-2 knots you might otherwise get if you can’t get the boat going.
Regards,
Eric
Hi Eric,
Couldn’t agree with you more about stern shapes, I think a lot is due to Fashion! Dragging sterns is slow and does horrible things to helm. The chine question interests me. It seems to be a cheap way of increasing waterline beam hence form stability without a big penalty in wetted area and displacement. I do have a gut feeling flattish aft sections and chines would benefit planing stability.
Know what you mean about masts, all of the scantling formulae use a myriad of approximations and arbitrary safety factors. Since I abhor huge overlapping genoas and would plump for a max 105% headsail so I would have a wide staying base which cuts down on the transverse inertia considerably. Not knowing your righting moment even allowing for your displacement ( bigger than my proposed but different requirements) your rig must be bullet proof with a C264 section which is of course highly desirable for where you sail.
I started looking at aluminium construction on a what if basis because of the durability and impact resistance. It seems to me not to be too much heavier than strongly cedar glass sandwich.
Thank you for the valuable observations on decks.
Cheers,
Terry
Terry,
Fashion, yes. The aft chine is a good idea fundamentally, but it requires a light, shallow flat boat to be able to gain from it. Production cruisers are a long way from that, so the chine needed to be moved up quite considerably, where it basically doesn’t interfere with the hull shape… Also if you generate righting moment aft, it means buoyancy developing astern with heel and it becomes very difficult to prevent a negative heel-trim couple from developing.
Flat aft sections benefit downwind speed, but the run of the lines into the stern must also be correct. It often isn’t. I can’t see the chine doing anything for course stability. Once the flow exits perfectly cleanly, the stern has done its job. Course stability is much more complex and involves the interaction between the hull and rig as well as the appendages.
Flat hulls have more righting moment, but also more wetted surface, at least upright. Hulls with the least wetted surface are completely rounded. Hull design really is the most interesting part and makes the biggest difference in the end. I had spent about 4 years on and off developing the Nordkyn hull.
The rig is bulletproof with the C264 section, but the numbers don’t support going down one size, it isn’t the result of being conservative. Both Selden’s and my calculations got to the same result. It just shows how unconventional the boat is. Keel-stepping the mast is what made the biggest difference to lowering the required transverse inertia. The first span from the deck to the lower spreaders is usually the determining one for Ixx. A wide staying base and small overlap makes a huge difference in the amount of sheeting coming out of a tack, it is night and day.
Aluminium seems to basically weigh about the same as a cored hull with strong, durable skins. Cored hulls can be lighter if you overlook impact resistance for the outer skin and just meet the tensile stress requirements… but it can be an unhealthy choice and fails to meet standards. At the limit, an alloy hull yields when a cored hull breaks, so it seems to be quite a good material choice for sailing to beautiful bad places.
Eric
Hi Eric,
you are so right about tacking and effort, however it is the ease of trim I like. Sailng with an overlapping (say 150%) genoa in anything other than very light breeze requires constant attention or the choking of the slot actually slows you down, a smaller headsail often gives a better average and considerably less fatigue. Keel stepped should result in in 30% approx reduction in required inertia according to what I have read.
I had been thinking along the same lines regards cored hulls, ( I have built 2). Aluminium trailer power boats seem common enough yet not sailing boats. Building a one off cored boat is not inexpensive so I was thinking Al might be an option worth exploring. Then I found your site.
All the best, early night for me so as to get up early to watch the racing in Bermuda.
Cheers
Terry
Terry,
I won’t be up much longer either now…
Keeping the displacement in check is the key. Many boats end up with an overlapping genoa just to try and get enough sail area. It doesn’t do them much good upwind and these headsails get very heavy to winch in. The old IOR boats with ridiculous mainsails…
Building alloy yachts is nothing unusual in Europe, like in France. Round bilge is less common as the skill is not so widespread, but it is nowhere near as difficult as it looks. Circa Marine in Whangarei does round bilge alloy here in NZ. I have designed both for alloy and cored laminate and I have used both processes. Building in alloy is fast, you work with big pieces of material and there are no curing times: weld and move on immediately. The work is quite clean, the material is no problem to cut and nothing is too heavy, quite a pleasant way of making a boat. Gouging seams and grinding is noisy, but there isn’t all that much of it.
In fact, this is exactly why so many powerboats are made out of alloy. Those hard chine hulls can be thrown together very quickly from CNC-cut panels with just a basic attention to detail and having a jig is not essential. The small ones have very little internal framing, often too little.
Eric
Dear Eric,
Thank you for this detailed information. I am an experienced sailor, who will return back to sea when my youngest goes to college in 4 years. I circumnavigated on wet cells, and am extremely interested in the LiFEPo4 changes to way we manage our power.
Q1. I saw in one of your article stating that you should keep the temp below 25C, but in the equatorial tropics, the day temp is about 30C, and the night does not drop the temp much. In wet batteries as long as you are watering the batteries you can overcome the ambient temp, how would you do that in a LiFePo4 system. It also means that you cannot have you battery location in the engine room, which was not obvious till now.
Dear Jonathan,
In the Tropics, you can’t realistically expect temperatures below the sea temperature, so up to 28degC in places. Having the battery low in the hull is the best you can do. It will age more quickly than it would at 20degC, but I would still expect it to last a rather long time.
Having them in the engine room would be senseless, as the temperature goes over 50degC and this would cause rapid degradation. It is especially bad on launches as they motor for long periods, but… many “cruising” yachts also motor a lot of the time for reasons that we will carefully leave aside here…
The aging mechanism causes the internal resistance of the cells to increase, the capacity only appears reduced if you try to get too much current from a degraded battery. In the end you might find that the voltage sags abnormally if you put a heavy load on the bank and then it will be a hint that it is reaching the end of its life. We tend to operate at low currents, so no one really knows how long one of these battery can last until it can’t do that any more.
The best answer for the tropics might be to keep the battery small, because charging is never really an issue. In all “sensible” sailing applications, I tend to think that anything more than 200Ah @ 12V achieves nothing at all (except converting cash into useless lithium). This way, if the battery proved to have a somewhat disappointing life against the 10+ years we are increasingly coming to expect now, you would have at least minimised its capital cost and maximised its utilisation.
Best regards,
Eric
Hi Eric
Thank you for the thorough explanation. I can only guess the time you took to do this.
You have not listed your Gen 1 Nordkyn BMS in your products for sale. (I only can see a listing for an alternator controller.) Are you going to sell this?
( I can only count 6 cells in the picture of the 2p4s 400ah battery above. I might have missed something there)
Thanks again
David
David,
I try to write one new article each year these days… they do take a while to write indeed!
I have been trying to move past that BMS shown into the pictures for production reasons, this is the reason why I haven’t got it listed as a product. I have another model on the bench that is more suited to manufacturing, as well as the prototype of a more complex unit I have been experimenting with.
It shouldn’t be too far away now.
There are 8 cells in the picture, look at the number of bolts at the cell connections.
Thanks and kind regards,
Eric
Brilliant article!!, I arrived whilst trawling the net for information regarding Lithium batteries and have been captivated by your writing on a range of topics since. Kudos to your travels and willingness to share your experiences.
Richard Selby
Richard,
Thank you for your kind feedback. I am glad you found this interesting.
Best regards.
Eric
I built a device (micrcontroller/relay) that desconnects the generator field when 14 V has been reached.
The field is reconnected at 13.35 Volts.
I was thinking to reuse my lead-acid battery charger by controlling it through the temperature sensor input.
Instead of an NTC I would just use o fixed resistor that lowers the end of charge / float voltage.
Or even better measure the charge voltage by a microcontroller and adjust the resistance so that a float voltage of 13.3
Volts would result. The idea is just to prevent any further charging when 14 V battery voltage has been reached.
Have you or anyone tried this kind of approach ?
Hello Mike,
Good on you for engineering something. Lithium batteries need absorption like any other battery and disconnecting at 14.0V will produce very unsatisfactory results unless the charge current is very small. Charging will stop a long way short of the nominal capacity and serious problems will develop over time due to systematic lack of proper charging. The only fully correct charge termination condition is based on voltage and residual current, typically C/30.
You can certainly fool and control a charger to do something else than it was initially intended for. Using the temperature input is a thought as long as it doesn’t decide that the value has gone out of range. You need to test that with a potentiometer – which you might have done already. The other way is manipulating the signal at the voltage reference input. We have done that with alternators for a few years now. When the charger/regulator has multiple stages, the solution must be able to work with them. It is easiest and simplest when the charger provides a constant voltage.
Now, this is charge control. The bank still needs to be protected independently of that of course.
Best regards,
Eric
PS: I have an article about charging lithium batteries at draft stage. When I publish it, I might move your post there.
Thanks Eric.
Your articles on LiFePo4 are the best on the internet.
My primary concern is to not overcharge. I am not that concerned with getting the full charge, I just want to stay on the safe side. My Hitachi alternator gives out just 5 Amps(C/20) at 14 Volts, that is an approximate current based end of charge together with the 14 Volt limit. I can configure the voltage to a bit higher to get a lower current termination point.
My (other) PIC18 based controller also measures the current, so I could include the current in the algorithm.
Eventually the controller should control the charge current from solar, alternator, and charger.
And it should measure the cell voltages also.
My battery charger actually has a constant voltage output setting of 13.2 Volts for continuous Pb battery load carrying.
I will check how the temperature sensor input does control the output voltage with the above setting.
BR Mike
Mike,
Getting a proper charge, at least from time to time, is extremely important too with LiFePO4 cells, otherwise the voltage starts rising earlier and earlier over time and the available capacity starts shrinking. There is a memory effect taking place over time with partial cycles and incomplete recharge.
When you charge with low-power sources, the battery has more time to absorb the charge and the voltage doesn’t rise as quickly, so it mitigates the problem. Increasing the voltage above 14.0V makes the pack a lot less tolerant to small differences in cell balance and more difficult to charge unless you have good cell balancing circuitry. Cells always seem to drift apart a little over time.
I have seen cells completely destroyed even though the pack voltage had never gone over 14.0V due to severe cell balance issues. Once a cell starts getting stressed during charging, it gets damaged and everything falls apart. You can live without automatic cell rebalancing and make manual adjustments from time to time (after 2-4 years in my experience), but cell-level monitoring is the foundation of everything with lithium.
You should be able to find the output voltage feedback in the regulation circuit of your 13.2V PSU and alter that if needed.
Best regards,
Eric
Dear Eric,
It will be interesting to see how the cell balance will drift. My plan is to use a C/20 top balancing charger from time to time, maybe once per year. It is one of those made for the R/C market.
I also have a balancing board that could be connected permanently, but I want to see first how the cells behave. It will balance at any charge level, and that is maybe not a good idea.
I managed to get the WAECO MCA 1225 charger to charge to 14.0 Volts and float at 13.4 by connecting a 47.5 KOhm resistor as temperature compensation. The charging turns to floating at 14 V / 1.5 A(15 minutes) charging current. Then I just manually depower the charger, I will not keep it floating for a longer time.
Looks promising.
Maybe I should lower the float value to 13.30 in order to get some discharge from the battery. Not to keep it full all the time. This would drop the charge voltage a bit, to maybe 13.9, but with the current based EOC, it should not be a problem. 13.3 Volts would allow the charger to bear the load from the fridge and other in harbour equipment, while not further charging the battery.
Using the CV mode would require some support circuitry to stop floating the voltage at the higher level. I’ll skip that for the time being. The “temperature compensation” method looks good to me.
Best Regards,
Mike
Mike,
Cell balance adjustments in a top-balanced pack can only be performed when the cells are very close to full of course, and this means when the voltage is rising in the upper knee of the charge curve. The current must also be low so the voltage really reflects the state of charge, not the internal resistance of the cells. Attempting to rebalance the cells blindly each time the voltage is above a given value doesn’t work, unless the charger is very small.
Floating has no value at all in terms of charging, absorption is what matters, and then charging needs to stop. Configuring a “floating” voltage that is lower than the resting voltage of the cells is one way of causing the charge to terminate and then it can contribute to powering the loads and prevent the battery from discharging too far again as you say.
Best regards,
Eric
Dear Eric,
Just to continue on my previous message.
One problem with the EOC current is that if the fridge compressor starts every 10 minutes, and the charger expects the EOC condition to remain for 15 minutes, the EOC charge condition may never be reached.
So I guess that to really define the EOC condition, the current of the consumers should also be in the equation.
Best Regards,
Mike
Mike,
This issue primarily arises when the charger tries to determine the EOC condition by measuring its own output, which is only correct in the case of stand-alone charging. If you are charging into a system that is also powering loads, then it is the battery current, not the charger output current, that matters. A charger suitable for a system of the type we are interested in must use an external current shunt to measure the battery current only.
Obtaining a complete picture of the current flows (sources, loads and charging) requires two shunts and then the third value can be calculated of course.
When the fridge compressor runs, the charger should try to maintain voltage regulation at the absorption setpoint and the battery current shouldn’t change. The EOC condition only needs to last long enough to avoid false positives, like when throttling down an engine while the battery is in absorption. This is a matter of seconds, not minutes. The battery current value usually needs to be filtered too, so brief fluctuations don’t cause an early termination.
Best regards,
Eric
Hi Eric,
In regards to protecting the lithium batteries from overcharge. Why not have a voltage controlled relay on the wires coming to the solar charge controller? Also if an alternator has a maximum output of 14.4 volts, it will never get high enough volts to overcharge the Lithium batteries?
Regards, Ryan
Ryan,
Any voltage above 13.6V is enough to overcharge four LiFePO4 cells in series, see https://nordkyndesign.com/practical-characteristics-of-lithium-iron-phosphate-battery-cells/ and look up “The Relation Between End-of-Charge Voltage and State of Charge”. It is a complete misconception that the maximum state of charge is related to the charging voltage. It is not.
14.4V is not only high enough to overcharge the cells, but it would also take them into a region where cell balance is extremely twitchy and very small differences in state of charge result in large voltage variations. Battery charging on board yachts is not a well-controlled and consistent process and the charging voltage is not smooth filtered DC power from all sources. Overcharging the cells invariably leads to their destruction as some cells end up going way over-voltage.
The charge must always be terminated.
Regards,
Eric
Hi,
Concerning Method No. 2 for balancing the cells, is there a problem with using the on-board battery charger such as a Victron Multiplus for the bulk charge in lieu of the alternator? Is there a way to program the Victron to do the top up as well?
Thanks,
Julian
Julian,
You can certainly charge the cells using a mains-powered charger, from the charger point of view, it is no different than charging any battery. However… going about it this way could take a lot longer than with an alternator, unless you have a high-capacity charger. You can’t leave this process unattended and if it is going to take many hours, you almost certainly will… this is the problem.
In order to top up, you would be connecting the charger to a very low-impedance, low voltage load (the cells in parallel at ~3.50V). How the charger will take it is an open question. A good charger should limit its output current and do the job. Another one might overload and trip or even burn out. If you also use a long wire as a resistor, then you should definitely be able to do it this way.
I don’t go into the details pertaining to specific equipment, manufacturers can answer questions about their products. Here I would just like to point out that an inverter/charger has no place in a dual DC bus lithium system, because it acts both as a load and a source and there is nowhere to connect such a device without creating an issue. You need to make a choice between the charger or the inverter.
Best regards,
Eric
Good point Sir! Thanks.
I have the same problem, Julian is dealing with.
Just designing two busses for the DC side, but also want to use a inverter/charger. Not for initial charge, but for usage afterwards.
Is there a wise way to configure the system, that I can make the inverter/charger work both ways?
Got the same Victron Quattro, which can be programmed for charging LiFePo via Landsupply and Generator, but it is also a good and strong inverter…
Thanks and best regards,
Ralf
Hello Ralf,
I had the opportunity to give further thoughts to this problem with combined inverter/chargers last year and I designed a solution using two low voltage drop (FET-based) battery isolators. A large one from the load bus to the inverter charger DC terminals and a smaller one from there to the charge bus. Just link the outputs together to use them as single large ideal diodes. It adds cost, but it enforces the isolation of the DC buses.
Kind regards,
Eric
Hey Eric,
thanks for the immediate reply and Your further thoughts solution!
Sounds like a perfect way to achieve both!
Do You by chance have a sketch for this, which I can forward to my electricians (unfortunately I‘m none), or some suggestions for dimensions? Or a place, where I can find further information for this?
Really appreciate Your help!!
Best regards
Ralf
Hello Ralf,
For now, I will e-mail you a little sketch, but there is not much to it. I will consider adding a diagram in the other article about electrical design, here is not the right place.
You need to know the maximum current the inverter can draw on the DC supply to dimension one isolator and the other only needs to be able to carry the current the charger can deliver to the battery (usually quite a lot smaller).
Kind regards,
Eric
Good morning Eric,
thanks again very much for your effort to help me in this topic!
The inverter/charger (a victron quattro) produces 5000W (12V system) and can charge up to 220A. It can be programmed to a lithium charge profile.
Unfortunately didn´t receive the sketch yet.
Kind regards,
Ralf
Ralf,
The reason is that looking after people who post comments is not the only thing I have to do these days and, while I always try to reply within 24 hours as much as possible, extras can take a few days.
Drawing 5kVA from a 12V nominal supply is borderline stupid as the DC current gets in the 400-500A range and, in these conditions, the option I was outlining is probably out just because of equipment availability reasons. Resistive losses go up with the square of the current.
Inverter and charger need to be separate and the charger must be controlled by the BMS to terminate correctly. There is no such thing a “lithium profile” with lead-acid chargers.
Eric
Hi great article very interesting to read and thank you for sharing. A couple of questions if I may have any of your clients with your newer driver board fitted it to a fibre glass hull and had similar results to the aluminium. Also do you believe a “Copper coated” fibre or carbon hull would work more effectively in conjunction with the ultrasonic anti fouling.
Thanks for your very informative website .
Hello Rick,
Thank you for the feedback. The new driver is slightly more efficient than the prototype as some higher specification components were available in SMD packages, but otherwise it will produce the same results. However, one of the main objectives of the new driver was improving its performance through changes to the control software and I have worked on this. The new software allows the driver to reach higher frequencies and also output considerably more ultrasonic energy when the supply is available to do so. For this reason, I expect that it will outperform the original version by a margin, but it is too early to make a statement on this. My hull is presently in the need of a paint job and I have noticed interesting signs after running the new driver at high output for just a couple of days, but this needs to be repeated and sustained.
The nature of the hull coating doesn’t matter, at least as long as it is not compressible and vibration-damping. Very soft ablative antifoulings should make less sense with an ultrasonic system, you can’t extend the life of the paint if it can’t be cleaned without coming off. The intrinsic antifouling properties of copper-epoxy coats seem unimpressive, but it could be an attractive option if you intend to clean it periodically, because it is very hard-wearing. Based on my experience, I would expect an ultrasonic system to make it considerably easier to clean when it becomes necessary.
When it comes to hull materials, solid glass reinforced plastics have given very good results with some ultrasonic systems, so the material is clearly capable of transmitting the energy. I definitely expect good results, but here again, it takes at least months if not more to obtain data and I only deal in straight goods, no marketing garbage with pictures of freshly water-blasted hulls!
A very important aspect is always transducer installation. Transducers need to be mounted so they can “vibrate” the hull skin, so away from stiffeners, and they must literally become part of the hull. Some of the commercial transducers are built in such a way that this simply cannot happen properly.
Best regards,
Eric
Interested in getting a system going on a 49gulfstar. Where did you source your components?
Any of the big electronic distributors really… it depends a little bit where you live. You can get transducers in small quantities on AliExpress, where you can actually choose the product and supplier, unlike on eBay where sellers too often try to hide the origin of the ones they are selling.
All the best,
Eric
I think that I see that you have bonded a thin strip of something to the ribs/frames – what is it?
Also,whilst I see that you have filled between the ribs/ frames with insulation and then glassed over the insulation there appears to be none where the ribs are – does this cause cold spots?
PS. Can one purchase your plans?
James,
You are an acute observer. The strips you noticed are plywood and they acted as a gauge as to where to stop when trimming the foam insulation. Their insulating value is inferior to the foam indeed and there would be better materials to use. Overall, they have been reasonably adequate. Their surface area is quite small, so heat loss is not an issue, but some light condensation can happen at times, not enough to drip.
Deck hatches are infinitely worse from this angle and I would tape clear plastic around the openings to “double-glaze” them in very cold regions.
No issues with selling any of the plans.
Best regards,
Eric
Thank you.
I had the same problem from Hatch and Portlight surrounds when in North of Norway for 3 years and Svalbard one very icy Summer
If I was to build ( and would love to)an Aluminium Yacht I would have no fittings fixed by drilling through the deck but would put everything on a
raised pads.
I note too ,apparently, no windscreen / hood….does that cause a problem ?
How much for the plans? I can but dream!
krs
james
James,
My experience with fastenings and aluminium is that you are better off drilling through and sealing very well with a product which stays soft (like Sikalastomer-710, never use a urethane adhesive, or use a foam rubber tape instead of sealant) rather than tapping into aluminium. If seawater gets into a thread between aluminium and stainless steel, you will shear the fastener trying to get it off and this is just the beginning of your problems as you still have to free the hole without destroying the thread after that.
All my hatch frames and windows are bedded on foam rubber tape and can be lifted off and put back into place without any issues.
No hood, windscreens and the like for me, I don’t need the windage and when I go outside I want to be able to see what I am doing and manoeuver without hindrances. A lot of cruising boats these days are incredibly awkward to handle and sailing seems to have been the last thing to have come into consideration…
When I have nothing to do outside, I don’t hang around the cockpit as the vane handles the helm all the time. The cockpit is quite deep however and if you sit behind the roof, you are well below deck level and almost completely out of the wind. With the windows at head height, you can see outside from the cabin.
When I designed this boat, I was doing it for myself and I stopped when I had everything in 3D CAD and calculated, besides some CNC cutting files and full-scale frame drawings. I went back to the 3D model for everything else as far as dimensions and details were concerned. In order to sell the plan, I need to produce a set of drawings and the price would need to cover that, but you would only be looking at a few percent of the cost of the project…
Producing the drawings “in advance” would be a waste of time. The new boat/custom built market is incredibly tiny and, in most cases, when you spend that kind of money on a new boat, you also want customisations and they immediately invalidate some of the drawings.
Kind regards,
Eric
Thank you for taking the time to reply….happy sailing.
krs…james
James,
It is the least I can do, you are very welcome.
Kind regards,
Eric
Hello,again.
The more I read of your design development the more questions come to mind.
For the rig did you ever or do you consider that a Carbon Fibre Mast and and Boom would have advantage over the Aluminium one that you have.
I do appreciate that finance might, in the end have been a persuading influence upon your decision. If you had had the finance available would you have fitted one?
I see today that there is some movement towards standing stainless steel standing rigging being replaced by Man made Fibre,supposedly to reduce weight too.
Hello James,
Of course, carbon spars would be very attractive for this boat, but keep in mind that the Selden rig – excluding standing and running rigging – represented over 20% of the total material cost already. Going to carbon would have doubled the price of the spars at the time. From a different angle, carbon has its long term issues as it can galvanically corrode almost anything else including stainless steel, but I don’t know enough about what happens in practice to comment further.
Cost in general wasn’t really an issue when I built the boat, I built for material costs and no labour and I frequently just went for the best (and not the most!), but within reasons. Carbon spars would have been beyond justifiable, but with the alloy mast I also knew I was going to get an extremely reliable and long lasting solution. I still tend to think today that an alloy mast will outlast a carbon one, rightly or wrongly. Even if I had been able to get carbon at no extra cost, I would have studied the matter carefully before going for it, and the outcome is not certain.
When you face the coils of wire and all the fittings in a crate, the weight of stainless steel rigging is amazing. My alloy mast section itself weighs 160kg and from memory the standing rigging competes with this. Stainless steel still has the advantage of being extremely resilient to abrasion and it doesn’t care about UVs. The lateral rigging on modern superyachts is usually continuous carbon fibre and they peel strands off at the each one of the spreaders. These things are being done, but I don’t think I would be too happy with a very thin little bundle of fibres leaving the deck to hold the mast on a 43′ ocean cruising yacht in the high latitudes and remote places. Even stainless rigging is hard to repair in many parts of the world unless you happen to have everything you need on board.
If the context/intended use for the boat was different, then of course all these considerations would come on the table. If you were not going to carry a couple of tonnes of gear like I do, then you could also carry a little more ballast in the bulb, reach even deeper with the keel and fit an even larger rig on the boat. It is impressive as it is already and it could go beyond that. A few months ago, I clocked 23 knots SOW with long periods over 20 knots while sailing up Cook Strait in a gale. You stand in the cockpit watching the spray blasting past the hull side like a giant fire hose wide open as the apparent wind gets amazingly low for the sea state and you tell yourself that you don’t really need to be doing that. It is all fine and under control, but you can’t help but think that your margin for error could be quite narrow. I used to feel the same around 14-18 knots and now I don’t pay much attention, so maybe it is a matter of getting used to it, but there has to be a limit somewhere.
Best regards,
Eric
23 knts is quite terrifying / exhilarating as the best I have achieved over any length of time was 12 knts down the Portuguese coast in a gale.
Whilst I had a very reliable and powerful autopilot I hand steered, one wonders at your speeds whether you trust to a windvane or prefer to “keep your life in your hands”?
Krs
James
I think the answer depends on the boat. If it tracks well at any speed like Nordkyn, there isn’t much of an issue. If you get pushed around and need to anticipate the yawing motion caused by the waves, then only a person at the helm can do that (but there can be ways of improving/fixing this with the sail plan to get it to self-steer).
In this case, the vane was holding it fine and I was inside most of the time. There wasn’t much for me to do outside and hanging around outside in heavy weather is always more risky than being down below. I never stop the boat and never stay outside for no good reason in bad weather. Later, I arrived in a narrower spot between the coast and some islands and rocks (the Brothers) and I took over steering because I needed to be almost dead downwind for a while and quite precise with my heading.
Coming from a late-1960s 30′ sloop with a top speed of 6.8 knots (the maximum I ever saw was 11 knots coming down a big swell sailing towards Staten Island), averaging 10 knots almost effortlessly and climbing up to 18 knots was a huge shift in the beginning. There is a lot less apparent wind on the run, but you can’t slow down or stop, or worse try to turn around. That morning in Cook Strait, I had the whole place to myself. The average wind speed was around 45 knots according to the weather people, but you wouldn’t have thought so on board. It was almost pleasant with 15-20 knots knocked off by boat speed. When I had gone from one to two reefs in the main earlier, it slowed the boat down momentarily with a large increase in wind speed and I was really pleased to accelerate again as I was winching the reefing line in. It is a different way to sail.
Kind regards,
Eric
Very interesting and concise record. We have experimented with these transducers and Chinese built drivers which are prone to rapid failure!
Where can we get details of your new design? Are you selling them?
Our experience is that although the transducers and drivers are rated at 60- 100 watts rarely do they consume that power, in fact we have had as low as 9 watts.
Consequently we get barnacles even on the footprint of the transducer area!
I am drawn back time and time again to your build photographs and here are a few more questions.
1) How do you stop the cut outs that you carefully marked and saved from falling straight through the panel when you put them back, as I can see no supporting lip?
2) Did you glass over the edges of the cut outs and in fill panels?
3) When painting the Bilge I note that you only sprayed about half way up the hull framing – why?
4) Had you,cleverly, allowed for some of fixing on the cabin superstructure to bolt the handrails to just below the portlight,as one suspects that neither the sprayed foam or it’s covering would have enough strength.
You are very welcome. I will take your questions in the same order here below:
1) A lip needed to be built up afterwards, usually using a strip of foam pre-glassed and then bonded into place. It doesn’t always have to fully surround the opening, like in the case of vertical door lockers. These have the hinge on one side and a back stop near the catch. The foam had to be removed and a strip of plywood inserted to allow fastening the hinge of course. A foam-core interior is a lot of work in this regard.
2) Yes, I glassed over all edges. This requires trimming the edge before building it up again.
3) The purpose of painting the bilges is eliminating long-term corrosion arising from pitting due to dust, dirt and dampness sitting against bare metal. Aluminium will pit in an environment where it is deprived of oxygen. The vertical sides of the floors and girders are not prone to these issues, so they don’t need to be painted.
4) All the hardwood handrails inside the cabin were designed with spans matching exactly the frame spacing, so they are bolted into the flanges of the aluminium frames through the plywood strips you had noticed earlier. You can lift your whole body weight on any of them.
Best regards,
Eric
Peter,
Publishing the full design and all the information required to build one from scratch is far more work than manufacturing the circuit boards (and you need to reflow a SMD board, program the processor, which requires being set up for it etc), so I have sold some tested PCBs to be finished (make the transformers etc with instructions) and some finished and tested driver PCBs. I also sold some complete units including encapsulated transducers here locally.
I am not 100% sure where this is going to go as there is a growing number of ultrasonic systems for sale already and it is a market that has been damaged by dishonest claims and some poor products. There seems to be a clear inverse relation between the amount of marketing and quality. When you read the material out there, some crowds do not even understand the product they are offering. From my point of view, there is quite a lot of labour involved in making finished systems because of the transducers and housings, but a few cruisers would be willing to help. Manufacturing the PCBs for the drivers is ok.
The transducer peak power is a function of capacitance, voltage and frequency: P = f x C x U^2. Here, it can get close to the transducer continuous power rating, so the driver does pack a punch. The driver operates very differently than those designed for ultrasonic cleaning machines, it emits short high intensity bursts and then switches to a different frequency. Even though the transducers are designed for a given resonant frequency (40kHz), they exhibit additional peaks at other frequencies, including higher frequencies. I want publish some data at some point as it is very interesting.
Because the driver starts and stops all the time and also operates at frequencies that are not resonant (and then the output power is low), the average consumption doesn’t relate to the rated transducer power at all.
It takes surprisingly small average power levels to get rid of hard growth, provided the peak power is there and the transducer attachment is excellent. The best is really epoxy-bonding them directly to the hull away from stiffeners, the keel etc. The new driver emits longer bursts and spends more time at resonant frequencies when the battery voltage is high. It also reaches higher frequencies than what I had used in the first 3.5 years with the prototype and I have already seen an improvement with algae even at the normal average power (we are in winter and I haven’t got the battery voltage to increase the output). It is now keeping my rudder near-clean in spite of being down to a very old coat of antifouling. The hull is not faring as well as it didn’t get as much paint and where there is none left now, around the forward waterline, it is growing thin long weed. Had I painted it thicker, I would be getting a third year from weak aluminium-compatible antifouling without hauling out, probably with occasional diving during the summer. I am already at a record now.
Best regards,
Eric
Whilst for long distance sailing draft is not a problem it becomes more so if Coastal Cruising.
However even with Coastal Cruising there are often some quite long passages of a week or more.
For us going say to the Azores or the Arctic is about 13 days at 6 knots, the thought of being able to increase the average is very appealing,especially to my Crew( Wife )
Speed also has the advantage that for those who cannot take long holidays enables one to consider cruising grounds further afield
I wonder did you compute the trade off of loss speed /pointing ability and subsequent increase in passage time if you had opted for a shallower draft and if so what might it have been say in 10 cm increments.
When we arrive in a Country we enjoy exploring which often means going up River. where a shallower draft is very useful.
James,
It is an interesting question and I had written a VPP code to investigate design trade-offs at the time, but this is basically a design that has been optimised towards one of the boundaries of the envelope and draft is one of the key parameters you cannot reduce without major repercussions.
Less draft would require more ballast to maintain the same righting moment / stability limit. This would make the boat heavier, so either the carrying capacity would need disappear to the benefit of the keel bulb, or the displacement would need to be increased. In the second case, the performance objective becomes compromised, because it would be challenging to carry an even bigger rig on the same boat length. You would need to overlap the genoa past the spreaders to try and get more sail area and this would have negative consequences on rig weight and loadings if the lateral rigging had to move inboard, or on the pointing angle if the sheeting angle was opened up. It also makes tacking and handling a lot less pleasant.
So a very small reduction in draft would be possible by reducing carrying capacity or using a lighter carbon rig to offset it, but the difference would be too small to change anything in terms of accessing shallow water. With a carbon rig, I would rather add another metre to the mast than reduce the draft. Any meaningful reduction in draft would make the design unfeasible and lead to a different kind of boat (one I don’t want), because everything here hinges on the low centre of gravity and light displacement provided by the deep hollow keel foil and bulb configuration.
If you look at all the centerboarders and shallow draft designs, they are heavy, carry stubby little rigs and struggle to move in light airs. When a boat won’t sail in light conditions, the fuel tank gets bigger, a heavier boat needs a larger engine, which is also heavier and it becomes a compounding downwards spiral.
In December 2016, I was sailing up the Northland coast on a light day. In the morning I saw a yacht coming out of an anchorage way up in the distance. It was just a speck, too small to see anything more. By noon I was near an Ovni ploughing through the water at ~2.5 knots with mainsail, staysail and genoa out on a beam reach. I sailed past it at 6 knots. Later in the afternoon, it was as small as it had been in the morning, astern. Sailing boats like that is a lot of effort for so little payback… I could have creamed it with my 30′ Arpege of 1968.
In a few specific parts of the world only, deep draft can become an issue. There are some rivers and bar entrances I can’t access here, but you can always find a bar too shallow for any craft. In all my cruising, I can only think of two places where I couldn’t go back now due to draft: a bay in the South Shetlands and a shallow inlet inland in the West of Tasmania. Anchoring “on the beach” magazine-style is hardly ever a smart thing to do. If conditions suddenly change, it all goes wrong way too quickly. To me, the supposed benefits of shallow draft are an illusion in comparison with what a design intended for sailing delivers every day.
I found draft to be a restriction for drying up on the tide for cleaning or even painting (it seems extremely difficult to find anywhere suitable for me in NZ). At the moment, the yard where I would like to haul out in the next few weeks doesn’t have any available cradles high enough for me (but I could readily go somewhere else) and not all slipways can accommodate me either. It just means that a little more planning or patience can be needed for these jobs. I can live with that.
In marine design, the primary purpose needs to be primary, and everything else secondary by definition. Having too many “important” requirements just results in boats that are fundamentally good for nothing in the end. The worst are the so-called “expedition yachts”. I wanted an ocean cruising yacht that could really sail and carry a couple of tonnes, this was the primary objective. I fitted everything else within this envelope.
Kind regards,
Eric
Thank you.
Your comment about the Ovni is very apt,speed is everything when Cruising as narrower / shorter weather windows are generally the norm…we like to get the long and exposed journey over as quickly as possible so that we can enjoy the Cruise .
I can see the problem of draft is a determining factor in Haul Outs but a quick review of yachts in the 55 foot bracket most have a draft in excess of 2.0 meters,so here in Europe would not be a problem.
I wonder too if the” slim” keel precludes you from drying out against a wall to either scrub down or staying in a drying harbour.
Your sonic anti fouling system seems to be a brilliant / effective solution to a continuing problem, one supposes that you do not have to scrub down very often.
I cannot find the height of your mast complete with antennae etc., ,but much more that 20.00 m could start to cause problems,though I still, despite the cost, like the idea of a Carbon Fibre Mast and the possibilities that it gives to raising the height without the weight penalty of aluminium.Some argue though that Carbon Fibre Masts result in a more “jiggly” motion than their Aluminium /heavier counterparts because of the differences in inertia – any thoughts?
Whilst I know that Copper and Aluminium do not mix,would or did you consider using Copper Coat type products as your anti fouling medium applied over a substantial barrier layer of epoxy?
There is scant mention of the Heads department is it large enough and do you have a hot water and a shower or do you resort, as we did for many years to a very large plastic container to stand in (fish box),bucket of hot water and a sponge.
James,
Draft is no effective issue for me… as you say, some of the bigger boats can be just as deep and in some cases deeper. When you dry up, the boat rests on its keel bulb, which is very substantial at 2.6m long and up to 0.5m wide. It is much more manageable and stable than a straight fin that tends to sink into the bottom. I dried up once in the South to tweak the feathering propeller, but it was an uncomfortable situation as the bottom had too much slope and I had to hang the stern to a post to control the situation. The tidal range is not quite enough here.
I have been told from a reasonable source that some big yards in Auckland paint alloy superyachts with high-build epoxy to insulate them and conventional copper-based antifouling on top, because the other stuff doesn’t cut it. I haven’t verified that myself. I know of a 40′ alloy yacht than developed a leak at the bow after burning a hole through from electrolysis after using copper paint and I also know of a major claim with a large aluminium workboat that had been painted with copper-based antifouling by the yard before launching… Realistically, considering the fairing and the number of layers of epoxy paint involved, I have a plastic hull and I could probably use standard antifouling, at least as long as I don’t scratch it down to bare metal anywhere. At the moment, I prefer to dive and haul out a little more often than take more risks.
The mast and antenna just reach over 20 metres. I think you could expect a saving of up to 50% on the section weight of the mast by going to carbon, to be investigated. That would represent around 80kg at 9.5m height. The additional contribution to roll inertia is IXX=m x d^2, so about 7220kg.m^2. The keel bulb contributes about 12000kg.m^2. If we say that the rest of the rigging weighs as much as the alloy mast, all up it would give IXX = 2 x 7220 x 2 + 12000 = 40880 kg.m^2 for the alloy mast configuration. The reduction would be 17.6% and it would produce a somewhat different roll motion. The keel bulb and the rest of the rigging still dominate massively however. What would really change the picture would be moving the ballast up like in a conventional design. I hardly roll, even at anchor and when everybody is complaining and leaving.
The head is opposite the workbench forward and you could make this space as big as you wanted and even redistribute the accommodation differently inside the whole boat. These are not meaningful design changes and the kind of thing I would expect from someone building a custom new boat. My head area is quite compact, so you can brace yourself easily at sea and it has a shower and draining floor. The water feed can be switched between fresh and seawater and runs through a gas water heater, so warm water is primarily constrained by LPG only. As long as you switch back to fresh at the end to flush the system, the water heater doesn’t care. Whenever possible, I prefer to use a solar shower rather than burn gas.
The ultrasonic system was an experiment and it is not magic, but it has been doing an excellent job with regards to hard growth. With algae, it helps, and I am starting to see that I have improved it with the recent changes I made to it, a bit more power and higher frequencies. On any alloy hull, this should be fitted from Day One with the transducers epoxy-glued permanently to the plating. Scrubbing really starts once there is no antifouling left in places in order to get rid of soft growth. The experiment is not over however, when summer arrives, the unit will be operating at higher power levels again. It takes very little to keep the barnacles away, but weed seems to be a different proposition.
Best regards,
Eric
Thank you.
krs
james
Eric,
First, I have enjoyed reading all your write ups on your experiences with LFP battery configurations.
Some background. I have been cruising for 22 years. Getting old so transitioning to a 44’ power catamaran. I experimented with drop-in LFPs in my last boat and was quite impressed. I am knowledgeable about wiring and rewired much of my last boat over the 15 years I owned her.
After 6 months of reading everything I could get my hands on concerning installing LFPs and the issues with charging sources, high voltage and low voltage disconnects, etc., I came to the conclusion that the system needed some way to deal with the lack of a battery should a HVD or LVD event occur. Looking at the charge profile of the various lead-acid batteries, it seemed to me that a SLA-FLP combination might work. Looking around the internet I found 2 discussions of this approach and one of them is your article here. Apparently, you agree that such a hybrid system could deal with the, hopefully, rare LVD event. In addition, it seems that you agree that it could also handle a less rare HVD event where solar, charger, or alternator try to overcharge the FLP pack.
Are you aware of anyone actually implementing this approach? How has it worked out for them? It seems to me that a second (failsafe) HVD (and LVD?) would be appropriate in this design to guard against a failure of the primary battery protection device.
The new boat is wired for four battery banks. 1 each for the engine start batteries. 1 for the generator start battery. And 1 for the house battery. Catamarans are of course weight sensitive and this is crazy. I intend to get this down to 2 banks as I did with my previous sailing cat. One starting battery for the stbd engine and generator. One bank, a hybrid 800 AH FLP/200AH SLA, for starting the port side engine as well as for the house bank. With emergency crossovers of course.
My expectation is that by keeping the SLA in parallel with the FLP bank I will not have to redesign the alternators or their control circuits. In addition, though I intend to modify the inverter/charger profile and the solar charger profile to FLP compatible values, I will not have to be concerned should something fail and try to over charge or over discharge the FLP bank.
I would be very interested in your feedback. Although there is much written about LFP batteries, most is EV, or RV related. There is not much marine related experience, and this definitely seems to be a marine only solution.. The other discussion about an approach such as this seems to be a dead thread.
Apparently your BMS is not ready for production. I am currently considering the Orion Jr. Do you have recommendations?
Thanks
Bryan
Bryan,
Lithium batteries will deliver the same performance regardless of how they have been packaged in these applications. The difference will be in durability. The disappearance of the battery from the system is the key critical issue with drop-ins of course, because they disconnect without any advanced warning. The only practical way of dealing with this is creating a hybrid bank indeed, with some “permanent” lead-acid capacity.
However, the capacity of the lead-acid isn’t truly additive, because once you configure the installation to charge the lithium cells sensibly, you also lack the voltage to properly recharge the lead-acid cells if they have been cycled. As a full lead-acid stands at 12.8V and a lithium bank at the same voltage is around 13% SOC, it is quite straightforward to see that the lithium is going to be doing all the work up to that point (which is nearly all the time).
The fact that the battery is packaged (usually with a lot of marketing first and foremost) only gives you protection against a battery fire and nothing else. It doesn’t change the facts that:
– The cells will get damaged if they go into over-voltage territory.
– The cells will also get damaged if they are getting chronically over-charged (which can’t be controlled with voltage). You still need to provide charge termination.
– The cells can and will go out of balance and unbalanced cells will go over-voltage at the end of every charge cycle.
– The only avenue you have to rebalance is going over-voltage periodically and if the imbalance becomes severe enough, it will cause a disconnect.
– If you happen to connect two packs in series to make 24V, then the packs have no way of balancing unless you drive a whole battery over-voltage.
Creating a hybrid bank only solves the disconnect problem. You still have to limit the maximum charging voltage to 14.0V, get rid of temperature compensation and provide charge termination when full / prevent recharging into a full battery. This last point is always the most challenging as lead-acid charge controllers are designed to keep a battery full and trickle charge it if needed. It is the case with any kind of lithium system, but a decent BMS can help you with this. With packaged lithium cells, you are usually flying blind.
I know of one installation that has been operating for a few years with some lead-acid capacity in parallel with packaged LFP cells and an adjusted charging voltage, but the owner cycles it daily and supervises charging manually. It turns into a headache with no really acceptable solution when he wants to leave the boat for a while without turning everything off.
Emergency cross-overs with lithium create a hazard as they basically connect a lithium battery to a charging system that is not suitable for it and the cross-over can be left on inadvertently. People swear that they won’t allow that to happen, but it makes no difference from the angle of liability, insurability etc. It is not something to have around. Use a jumper cable if you ever have to.
An inverter/charger can work for you, but only because you won’t be able to create a dual DC bus system.
A proper lithium-ion BMS is not an option for you if you start with packaged batteries, because you don’t have access to the cell voltages and your capacity is fragmented across a group of “12V strings”, instead of “3.3V blocks”. A BMS is all about individual cell voltages and current. When you buy a “drop-in” packaged battery, you typically buy a bunch of small cylindrical cells (because they are cheaper than prismatics) and a low-cost “disposable” BMS with every single battery. It makes little technical or economical sense to try and assemble a large capacity bank this way. If you are thinking about a BMS, then you should be buying bare cells and build your own bank.
My time got diverted by other work for quite a while, but I have been back on the new BMS project for the last few weeks with a view of finally bringing it over the line. The next iteration of the hardware will hopefully be the final one and only a little more effort is needed on the software.
Best regards,
Eric
Eric,
Thanks for the response, although I apparently was not clear enough. I will try to correct that here.
While I have tried drop-in LFP in the past, my current project is intended to use individual cells in a 800Ah pack with a BMS to control LVD and HVD events. On my previous boat I only had 2 battery banks (after my modifications), one small starting battery shared by 2 main engines and the generator and the house bank which for the last year was 2 SMART LFP drop-in batteries in 300Ah size. I only had 3 months of true cruising experience with the drop-ins, and even though I changed nothing on my solar, shore power or alternator charging systems I did not experience any power loss from disconnect situations. If these batteries were disconnecting due to high voltage during charging, it never became apparent. In that installation I only had a very small starting battery as my second bank isolated from the house bank by an ACR. Thus it is clear that I never saw a LVD event and if a HVD ever occurred it was masked by the small starter battery and the HVD re-connected after the charging current died before the small starter battery was impacted.
My goal was to avoid a major re-wire of the new boat upon arrival while still getting the benefit of a LFP house bank. That combined with the inherent issues of dealing with two engine alternators, and a new Victron Multi 3000 on an all 12V boat led me to look at alternatives that would still allow me to install a reasonably sized LFP house bank. The solar installation will be done after boat arrival as well as the LFP bank. The boat comes stock with 3 200 AH starting batteries and 4 200 AH house batteries. The house bank is too small and the boat has way more starting capability than it needs. So, I was intending to delete the generator starting battery by sharing the starboard engine starting battery. In addition, I would delete all the house batteries and use the Port starting battery as a “front end” to the new FLP house bank and wire it as both house and port starting battery. Thus the emergency start cross over capability should either bank be dead. In 15 years with the last catamaran, I never had to use the emergency start crossover so I don’t worry much about accidentally leaving it on.
I agree with your assessment that the SLA is not “additive” to the house bank in the normal sense. In this case, the battery needed to exist anyway to serve as the starting battery for the port engine so nothing is lost if it does double duty as the “bottom end” of the house bank. However, it seems to be just the ticket to allow for the fact that current generation charging sources are not smart enough to deal with the FLP batteries. If controlled by a BMS that can actually determine SOC based on Voltage and charge rate vs capacity, an HVD could disconnect the FLP bank and allow the SLA to deal with the fact that the various charge sources are designed for lead-acid characteristics. This would also allow the SLA battery to get the charge it needs to stay healthy by staying connected during the HVD and absorbing the normal SLA charge cycle. Even with a BMS that is voltage driven only, a little hysteresis, say dis-connect at 14.0 to 14.2 and connect at 13.2 to 13.4, should keep the system from cycling too much while still protecting the FLP bank.
When the FLP bank disconnects from LV, one would hope that the SLA battery still has enough capacity to start the engine. This would certainly dictate a reasonable LVD voltage set point. In addition, the loads that depleted the house bank need to be disconnected so as to not continue to deplete the starting battery (LVD disables the inverter output and most house loads). However, if this battery can stay connected to the solar controller, the LFP BMS and the engine system as well as the inverter/charger (with the inverter hopefully disabled), then charging can resume at any time there is a source and the BMS can re-connect the LFP accordingly.
I am currently proceeding on the assumption that this type of system would work. If the parallel system you are aware of is working as a manual system, then this should be able to work as an automated version of that. One of my concerns is that the BMS becomes critical to the health of the system. I am currently looking for a way to provide a fail safe, e.g. a voltage sensitive relay, for the high voltage side which I believe will be the more “active” case.
All of the above clarifies my interest in your proposed BMS and the other option I mentioned, the Orion JR. I believe this approach can “fix” all of the problems of disconnecting and re-connecting the LFP battery bank without the expense and labor of re-wiring the boat, adding external alternator controllers and dual alternator controllers, special solar controllers, separate chargers and inverters, etc. While the system may get modified over time, it makes more sense to me than replacing a lot of brand new equipment.
Bryan
Bryan,
Yes, I didn’t realise that – this time – you were not intending to use drop-ins again. The reason why they “worked” last time without changing anything else is because they have HVD levels set ridiculously high precisely to prevent them from disconnecting when installed in a lead-acid system. This allows the cells to get ruined over a period of time in order to secure the sales and, in most cases, by the time the battery is destroyed, it will hopefully also be out of warranty.
The situation with bare cells and a BMS is not much different in terms of impact on the existing installation however.
First of all, the battery disconnection scheme is a safety system that should never operate, not a way of controlling charging. Relying on HVD to terminate the charge of the lithium would be both bad design and poor in terms of performance, because the lithium would get no absorption time and this can represent around 30 minutes when charging with a lot of current, like what you get when running two engines and alternators in parallel. The consequence of this is that you still have to control your voltage properly, from all sources. This can require changes and investment.
If you use a proper lithium BMS and don’t built a dual DC bus installation, then a HVD means loss of power everywhere and the system can’t recover from a LVD, because it also loses the ability to recharge. This is due to the single disconnect point. This is generally undesirable on a boat. Leaving a lead-acid battery in the system at all times resolves the disconnect issue as discussed in this article and also leaves you with some power after a disconnect, so it mitigates the problem to some extent.
If you build a dual DC bus system instead, then you must separate the loads from the charging sources. This means some rewiring, but not rewiring “the whole boat”. In a dual DC bus system, you can also keep a lead-acid battery hanging off the charge bus to alleviate the HVD event. Or you can use a starting bank on the other side of an isolator as I describe, at least with some of the charging sources. This is where an electrical engineering component creeps in.
However, once you build a dual DC bus system, you are NOT allowed to draw current from the charge bus or charge into the load bus. This means that you have no proper place to connect a combined inverter/charger and you need to choose between the inverter or the charger and not try to fudge it.
On the same token, if you never used the cross-over switch in 15 years on your previous boat, the correct conclusion is that you don’t need it, not that building a hazard into the system is ok.
If you leave a lead-acid battery in the system after a LVD, it won’t do you any good in terms of capacity. Using a high LVD on lithium would be idiotic because you then deliberately deprive yourself of the deep-cycling ability of lithium for no gain: you would be left with a smaller lead-acid battery that will run flat before the lithium bank would really get low. LVD for a lithium house bank is typically 2.8V/cell with a warning alarm at 3.0V/cell. By then, you would have drawn your lead-acid battery down to 11.2V only and it wouldn’t be of much use to start an engine. If you want that battery for cranking, then it must be isolated like I describe so it doesn’t discharge with the lithium. A hybrid bank only resolves disconnect issues. There isn’t really anything else to be gained or obtained from it.
So the answer to your question is that there is no quick fix or shortcut with a dual DC bus system. If you don’t build a dual DC bus system, then you can simplify things at the cost of functionality/resilience by using a hybrid lithium/SLA scheme, but it is just going to behave like a single battery of course. It can’t be two banks while also being one. Even so, it still isn’t a quick fix.
The reason why the manual system has been working is because it has been managed manually AND all the charging voltages were adjusted. The owner has to manage it this way because it can’t be automated: he used drop-ins and the BMS is of no help. With a proper BMS, there are additional things you can do, but implementing charge termination means creating a way for the BMS to get the charge controllers to cut out and this is also a little engineering project. Regardless of what you do, once you are charging lithium cells you have to make all your charging voltages and charging profiles acceptable for the lithium. Battery charging requires voltage regulation, you can’t do it by pulling the plug.
Sometimes you can modify or trick the equipment in place to make it work more like what you need to achieve, and sometimes you have to replace it.
If you chronically fail to recharge LFP batteries properly, they develop major memory effects and you can end up with hardly any usable capacity after as little as 3 years.
The bottom line with lithium is always that the job needs to be done properly, or:
1) It will be intrinsically unsafe
2) Your investment won’t last
3) Performance will degrade early
A lot of DIY systems are unsafe and/or contain hidden flaws capable of causing very extensive damage. A number of commercials have sold very high-cost safe solutions into the high-end market and got burned due to premature failures. However, it is possible to build safe and long-lasting systems and this is the topic of these articles.
Eric
Hello Eric,
Thanks very much for making this information available. It is a lot of work to document a system in a clear manner so it is useful to others. Your time is much appreciated.
I’m just designig my system now and was curious about the base in the photo of the Tyco relays. Did you make that yourself? If so, what did you use?
Thanks very much,
Bruce
s/v Migration
Hello Bruce,
Thank you for writing.
I made the base board for the Tyco relays myself indeed. The material is known as Nylatron, it is very tough and a good insulator. It is sometimes used in electrical switchyards. You don’t have to use this, but be extremely wary of the connections becoming loose over time, especially if the plastic yields. I strongly recommend having nuts below as well as above the terminals, so you don’t rely on the pressure through the base board to keep the connections tight. Some people have damaged the relays from heat because the construction wasn’t quite good enough.
Best regards,
Eric
Eric,
I am currently engineering a system for my 46’ Sailing Cat for worldwide cruising. (So far my only purchase is a quality benchtop power supply) I have found that a sound investment at the beginning of a project saves a lot of money by the end. I have spent a lot of time reading your articles as well as many others but still long way to go. A few questions about this article:
I feel that a dual bus system is definitely the way to go. In your split charging schematic, you show a single disconnect between the isolator and the lithium bank. I would assume that this is for a HVD only which would allow the charge side to maintain some power to the house with the SLA essentially being the control for the chargers. I understand that this is a safety and should never actually happen if the charging is set up correctly, however, Murphy tells us that components fail at the worst possible times. Would the LVD then be prior to the load bus but still allow the charge source to recover the lithium bank? Did I miss something?
After you mentioned memory, I read a couple of research papers on it an am left with some confusion. While it appears that the accepted school of thought is that memory is not a problem, what has been your experience to alleviate this issue?
Finally, many people seem to like the Clean Power Auto BMS but they no longer sell to the DIY market. There are so many BMS options out there, I am scared of ending up with a junk BMS but I also don’t want to get something that has more features than what I really need. Paying high dollar does not always equate to high quality. And being in the middle of the South Pacific is no time to end up with no battery bank. Any advice on a good quality, simple BMS? I plan on manually balancing periodically.
Thanks in advance for any insight and for your very informative articles.
Scott,
Schematics showing a single disconnect are NOT for a dual DC bus system. Once you disconnect the lithium bank, it can no longer charge or discharge, so by extension it can’t recharge and recover from a LVD event. Whether you also lose power to the on-board loads depends on the configuration and whether there is charging current available or not. Studying the schematics answers these questions. The SLA is there to leave a load for the chargers and there are a few variations possible in this direction.
A dual DC bus system is the solution of choice for an ocean cruising boat, but it tends to require more analysis and engineering to address all issues. If you feed the charge bus from an isolator on a dual DC bus system, then you can divert the current to another battery in the event of a disconnect. Great concept, but some chargers refuse to work when wired this way, because they see no battery voltage… Every lithium system tends to be a small engineering project because of differences in the equipment involved in it. Sometimes you need to test some of these things to discover what you can and can’t do.
The system needs to be robust no matter what happens. Anything that can happen will sooner or later happen. HV disconnects do happen. All it takes is a poorly regulated charging source, like many wind generators are, a lead-acid charge controller doing something stupid or just poor voltage sensing somewhere. I have seen a bank tripping because there was a problem with a cell link connection: it was tight, and yet not good. Battery systems are often also high-current systems and they can be unforgiving.
The BMS you are referring to was a little solution designed to help people playing with EVs, which is a simple application where you either have a charger and no load, or a load and no charger. Fine. Some people started installing it on boats and it caused a remarkable amount of destruction due to the single disconnect point that left the chargers connected directly into the loads with no battery to help with voltage regulation. Most of the systems built with it are not fail-safe and/or plain unsafe. I have seen entire electrical systems fried because it had simply tripped. It should be pulled out.
While you do not always get what you pay for indeed, you don’t tend to get more than what you pay for either. I believe there a few usable BMS units out there, but nothing I am completely pleased with. So I build mine when I need one. One of these days I might manufacture a batch of interesting BMS units, but there is one unusual feature I want to include before that. A BMS should look after cell balance and should not require unusually high cell voltages to do so.
Capacity reduction from memory effect following repeated partial charges is a fact. It happens and it is visible. If you keep at it for long enough, you end up with severely reduced capacity. If the system is set up to charge properly, my experience is that the battery gradually recovers over a number of full charge cycles. If the end-of-charge voltage is insufficient, it can’t, the situation keeps getting worse and you end up with hardly any usable capacity. We are slowly coming out of winter here and my bank has seen well over a hundred partial cycles without full recharge. It charged to the termination point a few days ago and the same evening the voltage was already below 13.2V. That is memory effect: around 40% capacity unreachable because the voltage rises abnormally early in the charge cycle. It does recover as long as you don’t listen to the conservative-over-conservative charging “recommendations” forever repeated around. Lithium iron phosphate batteries need to be charged properly up to a termination point: “weak charging” is not a substitute for charge termination.
If you are in a situation where you recharge to full easily and relatively frequently with enough voltage, then memory effect is essentially non-existent. Lithium batteries need absorption just like any other battery.
Last, but not least, you need to understand what you are doing and why you are doing it when you build a lithium system. I believe you can always get there if you put enough time and effort into studying the matter. You need to perform a what-if analysis on your schematic before buying or building anything. The objective of these articles is supporting this process.
All the best,
Eric
Reading again about the mess that ensued after spraying the foam and then having to cut / fair back one wonders if it might have been easier to bond a barrier such as a sheet of epoxied glass cloth to the ribs drilled a series of small holes and then injected, through them into the void behind ,the foam ,rather than the other way around.
When laminating the Klegecell Foam Core one would suppose that you were only able to apply the Glass Colth to one side at a time, did this lead to any bowing of the flat sheet?
As always..Thank you for your attention.
I couldn’t see that working at all… voids everywhere, the foam pushing the barrier out of shape… What you can do is spray the foam thinner and then cover it with traditional panelling and you have an air gap between the top of the foam and the panels. Fitting and fastening panels is time consuming too and the result is both heavier and inferior to glassing a thin waterproof lining to the foam after shaping it. On the other hand, on the roof you can remove the panels and access the underside of the deck afterwards. On the hull, you would be wasting quite a lot of space because the back of your lockers is unlikely to follow the shape of the hull very closely.
Trimming the foam up to the deck was quick and easy. Most of the mess came from the overhead surfaces, so you could combine the two approaches quite successfully.
I laminated the foam panels one side at a time indeed. They stay dead flat if your table is flat, then you flip them over and do the other side. However, sometimes the foam can have a slight bow if it wasn’t stored quite flat. You just place a weight over a plastic bag on your wet laminate while it is curing. A can of paint does quite a good job at that. Once the first skin has cured, the panel keeps it shape.
Best regards,
Eric
Thank you.
You are quite right about the foam probably pushing the barrier out of shape, as always one is looking for a quicker( lazy short cut) way of doing things – which inevitably does not achieve the objective!
krs
james
Thank you for this series, it has been an absolute delight to absorb these articles.
It seems nearly impossible to find information this condensed and accurate on the subject. Many sources seem uninformed at best and dangerous at worst. Can’t wait for the article on charging, as it is the final pain point I’m struggling to get right, before building my own setup.
You rock.
Niko
Thanks Niko. I will try to get the article on charging out and finish the series. Finding the time to finish the draft while also progressing the BMS is a challenge…
All the best,
Eric
Hi Eric,
Many thanks for a very informative and well written series of articles on LiFePo4 installations on boats, an awful lot of information presented in a very understandable way, especially helpful is the “failure mode analysis” that covers many things that often get overlooked when designing a system. Most systems get designed around the concept of “how will it work” when they really should be designed around the concept of “how will it fail” – this tends to produce a much more robust system.
I am currently designing and planning a LiFePo4 installation on board our 42ft cat as well as a system for a 50ft cat, both systems will be installed over the coming winter and your articles have been very useful. Both systems will use Winston prismatic cells with 400AH at 12V on our boat and 400AH at 24V on the 50ft. You suggest that 200AH is enough for most boats but boats are generally more power hungry these days and both these boats are full-time liveaboards so the extra capacity is justified since the aim is to be able to run off-grid for extended time periods that requires powering fridge, freezer, large capacity watermaker and many other consumers. The larger capacity will allow for 2 or 3 days without sunshine if needed. Main charge source for both boats will be solar with alternators and mains chargers as additional sources.
The dual bus system is obviously the best solution but both boats will have Victron Inverter Chargers so this will not be possible since the Inverter Charger can be a load and/or a charge source. I do think the Victron units are very good and they offer functionality such as Power Assist that does not seem to be available on Inverter only units. In addition the Victron units allow for external signals from the BMS to turn off the inverter function and to turn off the charger function as required so it seems they can be safely integrated into the system although I note your aversion to combined Inverter Chargers.
After much research I have decided on the Orion Jnr BMS and although you shy away from making specific recommendations I note that some of the control function terminology in your articles is identical to that used by Orion so I guess you consider it be one of the better BMS units available. The Orion Jnr does give enough configurable outputs to allow designing and implementing of multi-stage protection levels and the software application is also very good.
I am sure your forthcoming article on charging systems will cover the various factors to be considered and I hope you manage to get it completed before I start installing the systems 🙂
All the charge sources will be fully configurable to provide the correct voltages and charging profiles to suit the LiFePo4 batteries – alternators will have fully programmable external regulators, solar will be controlled by Outback or Victron MPPT regulators and mains charger will be Victron with full control of charging parameters.
I am planning to configure all the charge sources with the correct voltages and charge profiles to properly look after the batteries, this is effectively the first line of defense and should provide proper battery management in almost all conditions and circumstances.
The BMS will provide further protection so that if cell voltages rise higher than the charge sources are programmed for due to any malfunctions then the BMS will turn off the charge sources – alternator regulators turned off, solar disconnected before the regulator and mains charger turned off using the Victron internal functionality. This is then the second line of defense.
Finally if cell voltages rise still further for any reason then the BMS will open the main contactor to disconnect the battery – so a third line of defense.
A similar functionality is planned for low voltage control although this will likely not be as comprehensive but will ultimately disconnect the batteries if voltage gets too low.
I am planning to include an audible alarm to operate just before the main contactor opens at both HVC and LVC, I understand your aversion to alarms for very valid reasons, however the Orion BMS has sufficient outputs to allow including the alarm just before the contactor operates so I feel that it cannot do any harm. If no one is around to respond to the alarm then the BMS will operate the contactor anyway so the batteries are fully protected.
Since the system will only have one main contactor a HVC or LVC disconnect will mean the system will not be able to recover without user intervention, indeed the Orion BMS actually requires a power off-on cycle after this event so user intervention will always be required. Given the other levels of defense designed into the system this event should never happen so requiring user intervention is an acceptable consequence.
I would be very interested to hear your thoughts on the system design outlined above.
Hello Chris,
The capacity of a system is determined by its intended regime of operation. 200Ah systems have proved to be very capable of sustaining vessels with full-time live-aboard couples running reasonable loads today like fridge, freezer and TV. The fact that people sometimes want to design for higher consumption levels doesn’t change that. What must be remembered is that all energy drawn from the battery must eventually be replenished and a larger bank often means longer recharging times. If recharging cannot be achieved using renewable sources like solar, then in my opinion the overall energy usage on board should be scrutinised in terms of efficiency and actual necessity before anything else, because running engines/gensets can hardly be called a “solution” and all proclaimed “needs” are not sensible needs.
I don’t personally see a lot of value in “inverter power assist” and I certainly wouldn’t place such a feature ahead of the functionality offered by a true dual DC bus system, but these are choices for you to make.
The issue with combined inverter/chargers is not one of functionality, but one of system design. If you are charging into the load bus and somehow you lose control of it (all it takes a broken wire or electronic failure), the BMS will disconnect the charge bus with no effect. If you breach the system design boundaries, you also compromise the intrinsic safety of the installation. You must remember that one day the equipment may not operate as designed/as you expect and then you need to have at least one last measure in place to protect the bank. The DC disconnector is the last line of defence.
I think I have provided enough information to make informed choices regarding a BMS for anyone who is prepared to download and study product manuals. I have always built my own BMS modules, never installed anything else and any commonality in terminology with one product or another would be coincidental. But by studying and analysing what is on the market in terms of capability and suitability for your design, you are following the correct pathway.
You are very correct when you write that having charging sources that do not operate in a way that represents a hazard for the cells is the first line of defence. Building an installation that does not challenge the protection system in normal operation is essential. However, chargers typically cannot determine the end-of-charge point in this type of application, so the BMS needs to provide additional functionality for battery management, like preventing systematic overcharging for example.
Implementing a staged protection scheme is indeed the way to go: try to eliminate the problem before taking a protection measure. This can be particularly important to prevent damage when charging if a disconnect is going to leave a charger with no load. Just keep in mind that having to “power to disable/protect” easily results in systems that are not fail-safe.
Alarms have their reason to be and all on-board lithium battery systems should have an alarm, at the very least to warn the owner ahead of a low-voltage disconnect. What alarms are not is a prompt for the owner to do something to prevent a dangerous situation to follow. An alarm should warn of an upcoming event or an apparent malfunction like a voltage regulation failure, but it should never mean “danger” by design.
It is for you to decide what level of resilience is acceptable indeed. As long as you do this with the understanding of the limitations and requirements it also brings, you can’t go wrong. In the worst case, you may one day have to live with the full consequences of what your design can produce, so make sure this is indeed acceptable.
I get into the specifics of equipment, compatibility and details of system design only when I consult on projects. This site is intentionally “product and brand neutral” and free of advertising.
All the best with your project,
Eric
Hi Eric,
Many thanks for your wise words, very useful.
The intention is that solar power should meet practically all the power supply requirements for both systems, indeed both vessels will likely be able to fully charge the battery bank by early afternoon in normal usage so leaving some surplus charge capacity to cover cloudy days and above average consumption. Alternators and generator are only really a backup to the solar and not part of the designed charging provision, albeit yachts do much more motoring than we like so we may as well use the alternators provided they are properly regulated.
The “power assist “ functionality has proved useful in the past hence my reasons for including the inverter charger, although consideration of future plans may mean it is of less benefit – one to consider carefully before finalising the design. Both vessels already have Victron inverter chargers and although it is not always best to design to include existing kit they are expensive units to replace so that also has some weight in the overall design decisions. Your concerns about some failure causing charging into the load bus is very important – obviously including an inverter charger unit prevents the use of the optimal dual bus system so there will only be one main contactor as the last line of defence that will operate at HVC and LVC so the system should be fully protected. The system will also be designed to make sure all charging sources are safe (as far as possible) if a battery disconnect occurs. I will try and think through all the potential “failure scenarios” and factor them into the design.
You certainly have provided plenty of information on the functionality required for a BMS and I fully understand your reluctance to make any specific recommendations, very wise – unfortunately most of us are not gifted enough to build our own and have to use the best we can find on the open market!!
Determining the “end-of-charge” point for LFP banks is a difficult problem since house bank usage inevitably means very variable charge and discharge times and currents over any period of time, very different to, say, an electric car that is either being discharged or charged (ignoring regenerative charging). At the moment I feel there will be sufficient functionality in the BMS to address at least some of the problems – since I will be living with one system I will be able to properly monitor and modify as required to try and ensure proper charging and prevent regular overcharging. Indeed it would seem best not to strive to get the last 5% of capacity back into the bank on a routine basis at the risk of overcharge. Obviously the ability to adapt the system at will is not a suitable design for remote systems although the other boat will likely be close by for a good length of time. Almost everyone is still learning about LFP banks on boats so it is almost impossible to say “charge to this voltage, this current and this length of time” it will always need to be an adaptive target – a consideration that must be included in the design. I would think even a fully monitored CAN BUS type system with variable current, voltage and time control of all charge sources will not be guaranteed to properly charge the bank, but it will obviously be much better than simple voltage control used by most charge sources at present. Unfortunately designing such a CAN BUS system is far from a trivial task and the market for such a system for house bank applications is probably still pretty small.
Your comments on alarms are pretty much the same as I had planned, they can only ever be a warning, since there will always be a time when no-one is around to hear the alarm and act on it. Final protection of the battery bank must be fully under the automatic control of the BMS. As you rightly say “power to disable” has no place in a properly designed fail-safe system, the only part of my system design requiring a “power signal” is the alarm itself, all other charge and discharge functions will be “power to operate, no power to disable”
Thanks again for your valuable input and time taken to reply.
Chris,
A lithium battery is charged when the voltage has reached a nominal value and the current has decayed below a threshold. Determining the end of charge is not more difficult than this and any decent BMS can help you with doing it. A system where the charging sources are under the control of the BMS can definitely charge a lithium battery correctly and this is should be the aim in any installation.
Voltage doesn’t “control” the charging of lithium batteries at all, as I developed in another article. Any voltage above about 3.4V/cell can fully charge and overcharge a lithium battery and – in my experience so far – any voltage below 3.5V/cell can also fail to recharge a lithium battery properly if it has done a lot of partial cycles and it is showing a memory effect. If the latter happens, battery health will start heading downhill.
Charge correctly and wisely and the battery will have a very long healthy life.
You can certainly design with a single common DC bus if the drawbacks are acceptable to you. Otherwise use the inverter/charger as an inverter only. I find mains chargers to be of very limited use in practice. If you have reasonable solar capacity and shore power available, run your some of your primary loads like refrigeration directly off the mains if you have to and everything else normally takes care of itself. Unlike most other power sources, mains chargers have the potential for relentlessly overcharging a battery and potentially drive it into thermal runaway and the safety engineering around them better be really, really good!
The #1 rule with industrial safety is “eliminate the hazard if possible”. Here, it is usually possible, so I always prefer when people don’t set themselves up for an accident by trying to mimic a lead-acid setup.
Best regards,
Eric
Hi Eric,
Perhaps I am trying to make things more complicated than they really are – I am very happy to hear your advice that voltage level and current threshold should be enough to ensure proper charging and minimise any risk of overcharging. Certainly the planned BMS has current monitoring and control that will be utilised so it seems I am overthinking things at this stage.
Mains charging is not an important factor in my plans since both vessels will be mainly off-grid and treating the inverter chargers as inverters only is certainly a viable option that will be carefully considered.
Many boats spend much time tied to a dock with shore power and mains chargers permanently switched on and this poses a big risk to LFP banks – although it could easily be argued that LFP is not really the best option for boats with shore power connection on a regular basis. LFP is much better suited to off-grid boats with ample solar capacity and that is exactly what I am aiming for. Also I am pretty sure the memory-effect issue will not be a problem since the solar capacity and cruising areas mean that fully charging the bank should be easily accomplished on a very regular basis – hence why the risk of overcharging is one of my main concerns.
It seems that we should be able to properly control the charge sources so we will, indeed “Charge correctly and wisely and the battery will have a very long healthy life”
Thanks for the reassurance – will let you know how things go once I get started with the install.
Chris
Chris,
If you have a feature that is both not essential and problematic in terms of risk management… the answer is quite straightforward!
Lithium makes no sense at all on vessels that are on shore power most of the time or unused with a few solar panels. As you say, you need to be living on board off-grid and then it becomes a necessity.
Build a good robust system and you will forget where exactly the battery compartment is on board.
Eric
Hi Eric,
Fantastic stuff – I learnt a lot from reading your articles and I think you may have saved me from making some potentially costly mistakes.
As a part time cruiser I struggle with a conflict of interest.
When cruising I want off-grid independance for 2-3 days with limited charging and some 80Ah+ consumption per day. (Fridge, freezer, navigation)
At 55N my 300 Wp of solar is not cutting it except on the best of summer days, but with a LiFePO bank it could be charged during the short motoring in and out of anchorages and the bank would still be sitting at partial SoC most of the time.
So far so good, I think.
However, in between cruising the boat is often docked with the mains connected for a week or two.
I like to leave the shore power on to keep the fridge, alarms system, 4G/wifi, heaters in winter, etc. working.
However, this would then keep a Lithium bank at 100% SoC almost all of the time.
The super simple solution appears to be adding a timer to the AC charger.
I could set it to turn on only for 1 or 2 hours each day.
Is there a better way to do this or would you recommend a 400Ah Gel bank vs a 200Ah LiFePO bank in this use case?
As an alternative, is there a practical way to add a separate Lithium bank as extra capacity used only during cruising?
I guess I could simply add a manual switch/relay to choose between the Gel bank or the Lithium bank.
This would have the added benefit that I could leave it to Gel setting whenever on shore power, solving the ‘conflict of interest’.
Best regards
Anders
Hello Anders,
Thanks for your kind feedback. Yes, things are a bit different in the high latitudes. Using a constant voltage AC power supply can be a better pathway than a charger with lithium cells. Just feed something like 12.8-13.0V into the system with a good filtered and regulated PSU, the bank will gradually discharge to a low SoC when you stop using the boat and the PSU will then hold it there. It just means that the first time you leave, you will be recharging for a while.
I wouldn’t rely on any kind of manual intervention and switching to make things operate correctly. A timer on a charger would not be a good solution.
If you make the bank too large, the risk is that it will never get charged fully. 80Ah/day means 40Ah overnight, which is reasonable. You don’t need a huge battery at all for that, certainly nothing more than 200Ah. The question is whether you will motor long enough to fully charge it from time to time. If not, make it smaller.
Keep in mind the dangers of having a mains power source connected to a lithium battery all the time and engineer things in consequence.
Best regards,
Eric
Very complete an helpful article, would you know why only Winston battery can tolerate -45C and Sinopoly and CALB only go down to -20C.
I need a battery bank that can be left in a not heated building during winter months ( unplug / Storage mode ) that temperature could go down to -40C.
Do you have any suggestions, what do you think of LTO battery?
Hello Charles,
Experiments have been conducted freezing LiFePO4 down to -70degC or so from memory and they eventually become completely inert no matter what their state of charge is. They returned to normal with full capacity once back at standard temperatures.
It pays to keep in mind that CALB and Sinopoly have historically been more conservative in their specifications than Winston. The other aspect is that when Thundersky was bought by Sinopoly some years ago, somehow they didn’t get the patent for the modified yttrium chemistry of the Thundersky cell. This went to (belonged to?) Winston. This modified chemistry has been touted to be superior in cold temperatures and Winston advertises not only storage but also charge and discharge down to -45degC. I have never seen any data supporting these claims however and so the question is whether we should believe them… Back in 2007, Thundersky was giving no storage temperature limits, but specified operation between -25degC and… +75degC!! CALB is happy with storage and discharge down to -20degC. Sinopoly suggests discharge down to -20degC as well, but storage down to -10degC. This is from datasheets I have had on file for some time by the way.
I don’t know what the rationale is regarding the lower storage temperature limit. Maybe mechanical stresses with differences in the shrinkage rates between materials or freezing point of the electrolyte (but I wouldn’t expect the yttrium to make much difference then) or very possibly just a lack of data. Very low temperature storage is not something you would normally go to great lengths to characterise… You could write to all three and ask them, Chinese companies are normally quite good with replying.
Personally, short of CALB or Sinopoly coming up with a constructed explanation as to why not to keep cells stored at the temperatures you are considering, I would be tempted to just do it, especially if the investment wasn’t huge.
Building a LTO battery is something that crossed my mind, but I can’t really see a justification for the much higher cost considering that, after some 10 years now, we still don’t really know how long a LiFePO4 bank can last in a good installation.
Best regards,
Eric
Hi Eric,
After reading through the the Nordkyn Project, I am having serious thoughts about building one myself. I have read in other comments that you are willing to sell plans, and I was wondering if you still are and how much that would be. Thank you so much for making all this information available. It is truly marvelous!
Hello Benjamin,
Thank you for your kind comments. Designs are made to be built, but the new build market is very small and this is a boat that was designed for sailing, when most people in fact have other priorities. When I built mine, I referred directly to the 3D CAD model, rather than producing a full set of drawings. I will only produce a set of drawings if there is someone wanting it, because it would be a waste of effort otherwise. I would to think about how long this would take, but in the big picture, a plan is only worth a few percent of the build cost. It is hardly a decision factor.
Now, quite a few people have expressed interest in the design, but it tends to last until they compare the cost of building vs buying a second-hand boat and this in itself shows that they are not interested in THIS boat, but rather in A boat. That is completely different and it is a non-starter. Building a new boat is always going to be more costly than buying a second-hand one, so there is no point wasting time on the subject. I built this boat because I wanted something I couldn’t get in any other way and I controlled the cost by building myself, but it wasn’t too much of a consideration.
So the fundamental question is whether you want that one and nothing else and build cost (which will vary widely depending on how you go about the labour) is not the main deciding factor.
Kind regards,
Eric
Taking everything into consideration, the cost of building new vs second-hand might not be as great as it first appears. Pretty much everyone I know has spent half to all the original purchase price again in the first few years of second-hand boat ownership fixing things and/or changing them to suit their purposes. Insurance and mooring cost the same, as does everything that wears (advantage of new is that the repair/replace time is more distant.)
Paul,
Well… remember that second-hand vessels have never been cheaper than now. The cost of building new hasn’t changed. Building is the pathway to getting exactly what you want as well as sometimes getting a kind of vessel that you couldn’t find on the second-hand market. If you build yourself, the cost of the materials could in some cases compare with that of a second-hand yacht altered to suit. If you get a new vessel built, the labour component will put the project into a completely different league.
Best regards,
Eric
Hello Eric
Brief intro: I am an Electrical Engineer with industrial control system experience. I did ~50,000nm of cruising about 25yrs years ago and am now planning a new ocean voyage. I have spent many – sometimes frustrating – hours with marine electrical systems mostly centred around electrical refrigeration and the related charging and battery systems. I am trying to catch up on technical advances since my earlier time at sea. There seem to have been three significant advances:
1. Much more efficient variable speed brushless 12VDC refrigeration compressors
2. More efficient and affordable solar panels
3. LFP battery systems.
Thank you for your excellent effort at writing professional engineering style articles on the complex (by marine standards) subject of LFP systems and their management. Having read all your articles as well as doing other research, I have a few questions:
1. Latching Relays/Contactors for LVD/HVD: You don’t ever write that these are your preferred option, but your images suggest it. Clearly the zero holding current is attractive and if the correct drive signals can be provided by the BMS or supplementary circuitry they have their appeal. I wondered whether you feel that latching relays are inherently less fail safe than normally open (NO) contactors? A mode of failure where the power supply to the BMS becomes detached or the BMS itself fails could leave these latching relays closed. Do you find that this is sufficiently mitigated by other levels of safety? As I am sure you know there are dual coil, NO, low holding power (~0.23A) contactors which are a compromise between wasted holding power and remaining mechanically fail safe. Contactors vs Relays vs Cost is another subject. I suspect you are happy with a 260A Relay giving the extremely low switching duty of these devices (ideally never under load!). Your views?
2. Layers of control/safety: If I have understood correctly there are 3 levels of control/safety to prevent overcharging (and one for low voltage). Those 3 levels are:
a) appropriate charging voltage from all charge sources – different from lead acid
b) charge termination by the BMS based on absortion current (among others) – disables charge sources
c) HVD on overvoltage using above contactors/relays if a) and/or b) fail
a) & b) are relatively straight forward, but require a systems approach – see below. c) should ideally never happen, but is required as a fail safe. c) is also problematic, because we must assume that b) has not occurred and opening the contactor can therefore result in a high voltage surge which can damage charging equipment and potentially any other load depending on system architecture.
You suggest using the engine starter SLA with a battery isolator as a practical way to absorb the surge and continue to provide a load to charging equipment. This is one of the few areas in your articles where I am not quite clear what your suggested architecture is. Your “idealised” systems diagram suggests splitting charging/load busses for good reasons, but your only proposed solution to the open circuit on the charging side is the engine SLA, as above. Is there in fact a solution which does not involve the – almost certainly present – engine SLA? eg some set of shunts which are placed across eg the alternator when the HVD contactor opens? Could this represent a solution to the charging sources which are not able to operate across the battery isolator diodes? Or is all this too complex and the engine SLA with isolator diodes is the most realistic option – combined with solving the issues around charge sources via those diodes.
3. Next steps from this article seem to be:
a) how to make the available charging source comply with the voltage regulation and shut down feature that the LFP+BMS require.
b) A BMS which matches your suggested features
For a), am I correct in saying that you intend write an article on this, but it’s not yet done? And for b) I guess we eagerly await the next version of your own BMS? Other options out there, seem to be in the “close but not quite and might be able to make it work with some external engineering” basket.
Many thanks
Oliver
Hello Oliver,
Thank you for writing. My first comment about refrigeration would be that, while many people now MAKE IT a necessity, it is not a necessity and most of their energy and battery problems can be traced back to it. Lithium does alleviate the battery problem and is much more efficient at energy storage, but the energy still needs to be found. Solar can keep up with it in sunny areas provided the overall load stays modest and there is good technology available to provide refrigeration.
Other areas of interest to me are sailing, yacht design and seaworthiness. I do have an issue with people trying to turn yachts into floating solar farms and power stations in the name of convenience, because it either becomes an accident in waiting, or it is not sustainable and fundamentally idiotic.
Now, when it comes to your points of specific interest:
1. Latching relays
Yes, they are my preference indeed, and the zero standby consumption is very important to be in the context of high-latitudes sailing and winters. The failure mode to be considered is that of the whole system, not just the contactor. In my view, you are worse off with a normally-open (NO) relay because the electronics controlling it are most likely to fail short or “frozen” and then not only it won’t release any more, but you won’t be able to see it until it should have opened and it is too late. The failure mode is of the worst type as it is both critical and undetectable. Typical situations would include a failure of the switching MOSFET (99% short-circuit) or a latch-up / lock up of the BMS CPU (which then won’t release the I/Os).
With a latching relay, the circuitry is only powered briefly when operation is required and you can check its integrity each time. If it fails short or the circuit gets broken, you can see it and you can alarm long before operation is needed for safety reasons. Lastly, if “power failed”, then by definition there is nothing to protect any more anyway and whether the contacts are open or closed is a moot point.
However, I can’t perform a failure mode analysis applicable to every context and installation, so I do not recommend one type of disconnector over another.
Of course, there are NO contactors with a switching coil and a holding coil and, in some circumstances, the standby consumption may be acceptable, but it doesn’t change anything to the above. If you are going to be energy-contrained at times, then any standby consumption is undesirable and a continuous drain of 2 x 0.23A represents 11Ah/day. Also, if such a system tripped on low voltage, you would be forced to release both the load bus and the charge bus and then it can’t recharge and recover any more.
In my view, the Tyco BDS-A relays with their current rating in excess of 200A should be adequate for installations found on small marine vessel, they are highly reliable and relatively affordable. There are higher-rated latching disconnectors available however, but if the currents are higher than that, then the system voltage should possibly be 24V.
I would also point out that it is not always very difficult to find people with a missing “sensible” gene when it comes to lithium battery systems… a yacht should be set up and operated to be energy-efficient and in a sustainable manner in the first place, not by trying to replicate shore conveniences at any cost.
2. No single measure should be relied upon to keep the installation safe, because the probability of simultaneous independent failures is hugely lower than the probability of a single one, and any of these failures should be detectable before causing an unsafe situation. By far, the most unsafe conditions with lithium arise with charging. A failure to disconnect the loads in discharge would only result in a loss of the bank, as long as recharging doesn’t take place afterwards.
Charge/over-charge protection does require a systems approach indeed. A charge bus disconnect is always the last resort and, on a well-designed system, it will have been preceded by an attempt to disable the chargers. If this had failed and the subsequent disconnect caused damage to some of the charging system, it would be unfortunate (and somewhat unlikely), but the battery would still have been protected successfully.
Using a SLA battery is a simple and effective way of absorbing the energy from a load dump, much more practical than trying to build a giant transient suppressor. In automotive systems, which rely on similar alternators, the strategy is making the infrastructure capable of surviving the load dump and transient (which can exceed 100V), not trying to clamp it, because it is not practical. On marine installations, it is worse because we often tend to run higher currents. A SLA battery is normally present in such systems due to the existence of an engine, but it doesn’t have to be this way: use the BMS to perform an advanced disconnect of the alternator field before releasing the charge bus contactor and there won’t be any surge. Or do both, prevent and deflect as a secondary measure. The text could indeed include this diagram, but the topic is quite specific to charging with alternators and my intent is to deal with it when discussing charging in a separate article, still to be written.
3. So, an article covering charging is needed indeed and it is not done. It will require a considerable amount of effort, because there are different cases: alternators, solar, wind and many of these come with variations. Producing all the text and graphics is always extremely time-consuming and keep in mind that it is work that has no directly identifiable return, because contributions to the site are very infrequent.
A key to dealing with charging properly has always been having the right BMS, it forced me to build BMS modules before building systems. At the moment, and for obvious reasons, getting the BMS production-ready is a higher priority than writing an article about charging.
At present, it is possible to piece together lithium systems that operate more or less acceptably when specific conditions are met: cycling is one of them. They can meet the demands of people living on board all the time without too much attention. Describing how to do that is not something I will do here, because these systems have flaws and significant pitfalls around charge control. This site is about doing things properly.
Best regards,
Eric
Hi Eric
Thank you very much for your prompt answer.
You are absolutely correct in explaining that currently LFP installations are very niche in their economic and practical control utility. Your economic calculations elsewhere demonstrate this point, and the problems – which I think you are referring to – with being “crewless” and possibly “on shore power/solar” for a large proportion of the life of the installation are not yet well addressed, as far as I can see.
If these can be properly solved then, although the economic argument for LFP may remain marginal compared to flooded lead acid, the practical benefits that LFP can provide – like large, long-life, fully-cyclable capacity for the size and weight, without any real memory effect may open the market penetration right up. If LFP could penetrate that classic cruising boat used for 10-15 weekends per year via these benefits then that market might be several orders of magnitude greater than the ocean cruiser live-aboard types. Just in Auckland, where I lived for 15 years BTW, there must be 50,000 such vessels. The South Coast of England, where I live now, it just littered with them.
I get the impression that the big commercial offerings in LFP are pricing themselves out of the sort of volume which, ironically, might have brought the economies of scale required to cross the chasm. Plus their systems, while well engineered, seem to fall short of exhibiting a proper systems approach in many cases. A company starting with V perhaps comes closest, but large holes seem to remain….?
Best regards
Oliver
Hello Oliver,
Lithium batteries are really good at cycling and operating for long periods without getting fully recharged. This destroys all variants of lead-acid batteries, so if the application falls in this category, then the economic justification is overwhelming.
For boats which are weekend cruising only and then their batteries are fully recharged in short order each time, it won’t stack up until the price of lithium cells reduces below that of lead-acid, because of the additional cost of management and protection. Even then, the application itself is inadequate. Lithium cells are not good for standby service and experience reduced life when left charged continually. A lead-acid battery in a standby application can last 8 years without much trouble, so why look further?
On the commercial front, we have Victron and Mastervolt, both out of Europe, now that Genasun left the field. None of them have ever been very convincing to me, but Mastervolt seems to have superior integration through CANbus if you are prepared to replace everything with their gear. They are all struggling with the same dilemma: offer maximum reserve capacity or offer long cell life, in which case keeping the cells full is not an option. This, combined with poor engineering choices, is what took Genasun out. I am referring to some of their “lithium” solar charge controllers that were holding banks at 14.2V. No charge termination.
Having a full battery at all times, i.e. maximum reserve capacity, is what the consumer ideally wants and it matches his understanding of reserve capacity. The commercials appear to have decided that achieving this was the priority and (probably) that reduced cell life should lead to more battery sales. It became a problem when battery life proved too short in relation with the huge price tag…
I think that their chances of penetrating the mass market are zero because it is the wrong battery anyway, and they already ruined their opportunities in the cruising/live-aboard market. What does this leave? The luxury segment, which is where lawsuits also easily come from, and racing yachts. Racing yachts are perfect for them, they want high-performance, low weight and longevity is irrelevant.
The mass market is being targeted by companies making drop-in, packaged batteries and claiming it is just a straight swap. The cost is low in comparison with fully engineered systems and so is the commercial risk to them. The warranties are just short enough to keep them out of the bulk of the trouble.
Best regards,
Eric
Hi Eric
I re-read your BMS article, and it kind of answers Q1 above. Sorry, a lot of reading in a few days.
Oliver
Dear Mr Bretscher,
In my search for a seaworthly boat I am (till now) attracted by the Contessa 32. By chance I found your fantastic website from which I learned a lot about sailing hydrodynamics.
What I do not understand is your statement “Narrow and pinched stern lines were always a mistake, they gave boats that were unable to accelerate in following seas and became unmanageable as waves caught up with them”
Is this result of the wake created by the classic forms of non planing hulls? On the other hand broad sterns will be more lifted up by the wave coming from behind and so putting the bow downwards.
Best Regards
Marc
Hello Marc,
Pressure (or wave-making) resistance on a hull has two main contributors. First, the hull needs to part the water forward and this results in the pressure wave known as the bow wave. Next, the water needs to “close” back behind the boat. This can never be achieved perfectly because a turbulent layer of water (the boundary layer) develops and grows along the hull and it prevents the streamlines from precisely following the hull shape astern. Stern pressure pushes the boat and reduces resistance, but the existence of the boundary layer means that the stern pressure can never be as high as the bow pressure and the difference is at the origin of the pressure resistance.
Now, if the stern lines are very curved, then the flow can stop following the shape of the hull and eddies and water recirculation appears in this separated region. When this happens, it causes a much more significant loss of pressure in the stern region.
Pinched stern lines cause this to happen once the speed reaches a limit. People have observed this behind Colin Archer-type hulls for a very long time and even offered theories about the “benefits” of that strange wake (!), but it is complete garbage. Deep buttock lines suddenly curving upwards before the transom can also cause flow separation even with a broad stern. Many modern boats are like this because the designer wanted more depth inside to fit the engine, accommodation etc, but it is very unfortunate in terms of hull hydrodynamics. The Halberg Rassy 44 is an example of this, the hull is completely distorted and deepest way aft…
When significant pressure loss occurs around the stern, the positive pressure at the bow is no longer compensated for and resistance moves forward. This promotes course instability and broaching. This is why many old designs become completely unmanageable and dangerous in following seas. This includes many IOR-era designs, not just the old double-enders etc.
The shape of the stern hardly makes any difference to trim. Have you ever seen a boat with the stern deeply immersed in a wave and the bow up or flat? The trim is determined by the position of the boat on slope of the wave front and this is mostly related to hull resistance. What makes all the difference in the end is whether the steep part of the wave can catch up with the boat and pitch it bow-down or not. If the hull is slippery, it will keep ahead of a steep crest with a sudden burst of speed until it has smoothed out enough to be crossed. A large wave about the break has a vertical face near the top and it can’t be crossed by a small boat regardless of stern shape. If acceleration causes a massive resistance increase forward, then an accident has to follow.
I once met an English sailor who had sailed a Contessa 32 from South Africa to Western Australia in the late 1990s. She got into high winds and heavy following seas about half way and described to me that the boat was out of control with the foredeck completely underwater and the rudder unresponsive. What followed before long was rather violent because a wave lifted the stern even higher and the boat pitchpoled. Not only the rig was wiped out, but the hull suffered significant structural damage, including a fractured bulkhead. She eventually reached Perth under jury rig.
Many Contessa 32s have sailed around in the Tropics, but true bad weather just doesn’t exist there. As far as I am concerned, it is a bad and a dangerous boat. Hindsight is always a wonderful thing of course, but – assuming that a Contessa 32 can point acceptably in high winds and heavy seas, a very open question – had she turned it around and sailed upwind, she might have come out better off because designs like this one just won’t run in heavy seas.
Another one is the Cavalier 32, with pinched stern lines, but a fin keel this time. They become completely unsteerable in following seas and broach and I know of one that was also dismasted on the same passage while trying to run and eventually made Hobart under jury rig.
Look for a boat with a reasonably straight run of the lines aft, a spade rudder or a very small skeg and a decent transom. It will handle much better at sea, even in good weather.
Another boat of a similar size is the Lotus 9.2 and quite a few were produced here in NZ. The rudder design is terrible, like a small barn door with a hinge in the middle, but apart from that these boats sail and behave quite well in the sea. A couple of years ago, I advised someone about the design of a new transom-hung rudder for it and we eliminated the skeg entirely. It turned it into a different boat, faster and much more responsive at the helm.
Best regards,
Eric
I am about to place an order for LiFePO4 batteries encased in aluminum and am trying to figure out the best way to build the bunk. There will be 32 cells in a 2P16S configuration for a 48v motor. Should the cells still be packed in a compressed (clamped) configuration like the plastic cased cells (CALB, etc)? If not, should I then design the bunk to allow air circulation around the individual cells to better facilitate cooling?
Great article, btw. Especially the tips on placing the order.
Hello Jon,
Cells in aluminium casings are less prone to delamination over time, but you are going to need to secure them anyway, so you can just as well clamp them.
Cooling is very much a question related to the amount of current you are going to run. In my experience, it is not relevant at C-rates of up at least 1.0, and definitely irrelevant at 0.7C. I suspect that your average discharge rates will be much lower, so you shouldn’t need to worry about air flow.
Note that as cells age, their internal resistance also increases and they start to run a little warmer than when fresh and new, but we are talking about a few degrees only, at the most. Unless your ambient temperatures are going to be high already, it hardly matters.
All the best with your project,
Eric
Thank you. I anticipate sustained discharge rate of .5C for about an hour. Longer times than that would be at even lower, any higher rates of discharge would be for shorter periods. 1C would definitely be less than a minute at a time. (Motor = 20 kWh, with battery capacity a little bit higher, depending on the cells I end up ordering).
I plan on really babying these cells BS keeping them out of the knees. I hope not to age them prematurely.
The cell temps will be monitored by the BMS via thermistors and when in use. I know internal resistance affects temperatures and is a function of the quality of manufacturing which is always a gamble with Chinese manufacturing (despite the assurances of the U.S. distributor). Still, clamping the cells makes the bunk design challenge so much easier and takes up less space in the end.
Thanks again for sharing your wisdom.
Jon,
You must mean 20kW for the motor. kWh is an energy unit, not power. If your average discharge rate exceeds 0.3C, then it might suggest that the battery capacity is on the low side on the basis that the recommended charge/discharge rate for long life is typically 0.3C with LFP. However, it also depends on how much you use the system.
I would not recommend “dropping them underneath the bunk because it is more convenient” on the basis that any movement will also stress the cell connections and I stopped counting the failures I have seen in LFP systems due to overheating at bad connections a long time ago.
“Keeping them out of the knees” is popular internet garbage. If you don’t charge LFP cells correctly and properly at least from time to time, they develop problems with early voltage rise or, in other words, the “knee” you are trying to avoid moves back against you and the useable capacity shrinks until you have too little left to operate. It is caused by a memory effect that develops and strengthens over many cycles when they don’t get returned to full. Charging them properly requires voltage and absorption time until the residual current condition is met.
When it comes to the low end of the curve, there is no drawback in using the available capacity as long as the bottom voltage is not breached.
Bashing the Chinese manufacturers is also quite popular, except that it has no foundation. The main players seem to consistently deliver good cells with very few issues and I would be far more concerned with what happens afterwards with the retailers.
All the best,
Eric
Hello Eric and spectators.
One thing that is not mentioned is to just drop in a prismatic LFP bank that is charged from the starter battery. I quess this is what the drop in LFP packs in essence do.
An intelligent Battery2Battery charger with a LFP profile would charge the LFP from the SLA whenever the SLA voltage is higher than than the LFP voltage and sufficient current is available. EOC charge would be determined by LFP voltage and charge and consumer currents. Restart of charging occurs after sufficient voltage drop of the LFP battery.
The advantage would be that the charging sources need not be modified. They would be happily charging the SLA starter battery.
I am building this system for my boat for this season.
It has a 44 Ah starter battery and a 100 Ah LFP (Winston) bank.
The device can measure SLA and LFP voltage, charge and consumption currents, cell voltages.
It can switch on and off the charging and consumption currents with some heavy duty parallelled P-FETs.
Mike
Hello Mike,
Yes, conceptually you can do something like this, but remember that commercial battery-to-battery chargers are not switches, but DC/DC boost converters, otherwise they wouldn’t be able to do the job. You need to raise the voltage first in order to transfer some charge. It comes with several significant fishhooks:
1/ The charging current is limited by the capacity of the DC/DC charger (boost converter basically). It can be acceptable for a small system, but it doesn’t scale up.
2/ Charging efficiency is reduced because the converter is a low-voltage high-current device and losses follow R x I^2.
3/ The converter becomes a critical failure point as all charging has to go through it.
4/ Most (all?) DC/DC chargers sense their own current, which is NOT the battery current when it is also powering loads while charging. This means they can’t determine termination correctly.
This is why I haven’t listed this as a suggested configuration. Small battery-to-battery chargers have their place in some installations (and not only lithium), but passing heavy current through one is not a good option.
The device you are describing is something much closer to a VSR than a B2B charger. In order to work properly, it would need to be able to regulate its own output voltage, or you won’t get any absorption at higher currents and absorption is critical to the long term health of LFP cells. In order to provide this, it would need to be capable of performing PWM switching. If it also measures cell voltages, then it is effectively a BMS with a charge control function and you could homebrew something to this effect.
Note that drop-in LFP packs don’t have any charge control or power conversion electronics at all. The cells would be exposed to whatever voltage is fed to the starting battery. All it does is disconnect itself before going into thermal runaway or running down flat, with some cell balancing functionality at high voltages.
This is an interesting contribution. Thank you for writing.
Eric
Yes, it is a VSR/BMS optimized for my particular scenario.
I don’t want to charge the LFP unless the charging sources are providing enough current, so I decided to skip the DC/DC converter part.
The starter battery will be essentially full all the time so whatever charging current is available will go into the LFP.
I was going to buy a commercial B2B charger, but since it could not determine EOC reliably, I decided to roll my own.
As mentioned, it can measure the charge and the consumer currents and the SLA and the LFP voltages and calculate gradients.
So it can be quite smart about determining the EOC.
The switch will be using 4 parallell FETs with a combined Rds of 0.4 milliOhms.
With the maximum charging current (50 amps) available in my boat you will not heat them up.
The loss is 1-2 W at 50 Amps. (12.5*12.5*0.0016)*4.
A high efficency high current DC/DC charger would be much more complicated and expensive.
Currently the device is actually capable of PWM in order to provide absorbtion.
But since my charging sources are limiting currents and voltages well enough, I think I can get a pretty good/safe absorption without the PWM.
This solution is essentially a hybrid SLA LFP bank, but instead of modifying all the charging sources, it has this VSR/BMS instead.
Thanks for answering keeping this site up. It has so many good insights.
Mike
Mike,
It is an interesting pathway, but relatively inaccessible to the broader public. I have been in the same position having built BMS modules with tailored capabilities to suit my applications.
If your charging sources are controlling for SLA charging, then they shouldn’t deliver an absorption phase for the lithium, but this being said, you could probably find some workable settings considering that the engine SLA battery should never require a lot of recharging. Alternatively, implement PWM control to limit the lithium bank when needed. With PWM and lithium, it is absolutely critical that charge termination occurs in time, otherwise the PWM can cause narrow voltage pulses high enough to break down the electrolyte around 4.2V, when the cells can’t accept any current anymore (i.e. over-charged). Overvoltage is what causes bulged cells and this can easily happen when switching high currents, even if the average voltage appears correct.
Best regards,
Eric
Thank you for a very clear article on a confusing topic. I had designed a much more complex system and after studying this I realize I have been overcomplicating it. There are two things I am confused about on this topic and I hope you can help. For my long distance racing boat, I plan to have just a shore power charger and an alternator with a Balmar 614 regulator. There will be one LFP bank and one AGM battery (for starting). For the most part the boat will be plugged in to shore power, and the alternator will be relied upon to charge during long races. I am thinking I should wire the batteries as your diagram above, with a FET battery isolator fed by the Balmar 614.
Regarding the shore power charger, it has several outputs but only allows one profile. I am thinking I should connect each of its outputs directly to a plus terminal on each battery and set it up for the LFP profile. I suspect the AGM profile is close enough to the LFP profile that this will work well when I’m plugged in.
But the Balmar 614 has only one output that would be connected to the input of the FET isolator. The regulator also has charge profiles and I can set it to LFP. But how would a profile work when more than one battery is being fed? Can the regulator even sense the voltage of the batteries through the isolator?
Thanks very much.
Hello Jim,
Yes, using a FET or diode isolator to split the alternator output is almost universally the best solution. This leaves the issue of sensing the right voltage. If you sense the isolator input, the battery voltages will be lower and this drop will increase with the current. It can work with a FET isolator, but not a diode isolator.
Since the LFP battery has much stricter requirements for voltage control, it is logical to sense the voltage there, but before the battery disconnector, as shown in the article above! Now, AGMs require higher charging voltages and this is where it becomes interesting. The voltage drop over each leg of an isolator varies proportionally to the current (resistive effect), so the voltage at the input of the isolator is always higher. If the LFP leg you are sensing for voltage control carries a high current, the isolator input voltage will be higher and this will normally drive the AGM voltage higher than the LFP voltage because the AGM should not normally require much charging (i.e. low current). When the LFP battery gets close to full, both currents become low and the voltages even out at the regulation level.
This works best if you use a simple diode isolator, rather than a FET-based one. The diode will drop about 0.4V at low current and maybe up to 0.9V at high current. This can give a momentary advantage of up to 0.5V towards the AGM during charging. You don’t get such a big difference if you use a more expensive FET isolator, so don’t.
Do NOT use so-called pre-programmed lithium profiles. You need to configure the regulator control voltages directly. Typically 14.0-14.2V absorption, 13.4V “float” – the terminology is incorrect – and maximum absorption time of about 35-40 minutes.
If your engine comes with an alternator capable of sensing the voltage at the battery, like the Mitsubishi alternator found on Volvo engines, then use our VRC-200 controller with it as it is. It is far superior and much more reliable than the MC-614. You can’t achieve correct charge termination for lithium with a MC-614, only approximate it. If you are installing a new high-capacity alternator, then look at the combination of a Delco 28SI + VRC-200 with a current measurement shunt. You will get higher performance and correct charge termination with all the benefits of using an alternator with built-in thermal protection through current fold-back.
For shore power charging, the very last thing you want is keeping the LFP bank full all the time. It should be stored at a low state of charge. If necessary, use a charger you can configure as a constant voltage DC power supply and set it for 13.0-13.2V. It will just prevent the LFP battery from going flat. This works best if a small load is always on, so a full battery can gradually discharge after you return to the dock, or make sure you return with a low battery before hooking up to the shore power. For the AGM, consider using a small and completely separate SLA charger. The starting battery should never require much charging.
Best regards,
Eric
Thanks Eric, that’s great information. I sent you a note about your VRC-200.
Offshore Special Regulation 2.28.4 requires “a dedicated engine starting battery when an electric starter is the only
method for starting the engine.”
To comply, I need to have a dedicated starting battery which is why I asked about the second diagram. Additionally, given your experience I’m sure you understand that I need to make sure that I never lose house power because a BMS decided to switch off my load. As unlikely as this would seem, should this happen during a MOB situation a life could be lost. With that in mind I have two more questions:
1 – I see you designed, and discussed in an earlier comment, that there is only one switching device for over and under voltage situations on the LFP bank. Could the one you drew be used for undervolt only and a second one be added between the isolator and the LFP battery for use in over voltage situations? The idea is if I’m running the engine (as I may be in an emergency) and the regulator fails, I would not lose the load, just the charging.
2 – Is there a way to use the single SLA for both starting and as a backup for the LFP bank (without requiring a switch, your analysis on that seems solid)? If not, could I add a second SLA battery in parallel to the LFP bank, similar to the first diagram? I would hate to do that!
Thank you!
Jim
Jim,
Having a dedicated engine starting battery is basic common sense for all but the smallest boats.
When it comes to your point #1, the situation you describe is the key reason for using a dual DC bus topology. It is a lot more resilient than a system with a BMS controlling a single disconnector. However, in order to build a dual DC bus, you need a BMS capable of controlling two separate disconnectors, usually of a latching type and great care must be placed to ensure that a charge disconnect event doesn’t cause any damage.
Regarding #2, if you used the starting battery as a backup for the lithium capacity, then I imagine that it would no longer comply with the regulations in the sense that the starting battery is no longer a “dedicated” battery. The difference between a lithium and a lead-acid battery in an extreme discharge situation is that the first one cuts out just before the voltage collapses, while for the second one the loads drop out as the voltage collapses. If you were running two equivalent installations in parallel through this case, the lithium system would stay up for longer, because its discharge curve is much flatter for longer. So, arguably, you are not worse off because the lithium battery may eventually disconnect and if you really want to be able to access all of the available capacity, disconnect at the manufacturers’ recommended low voltage point of 2.5V/cell. I like to alarm at 3.0V and disconnect at 2.8V, but the capacity difference between 2.8V and 2.5V is extremely small anyway.
I like running 3-bank systems on boats: 1/ engine starting, 2/ house and 3/ essential instruments. The instruments battery can be a very small SLA battery (it is normally always full) and the instruments (modest load) can be fed from both the lithium house bank and their dedicated battery through two diodes (or better, FET-based ideal diodes). Because of the voltage difference between the lithium and SLA, the house bank effectively feeds the instruments until it runs out and then the SLA takes over. The SLA also bridges any large dips in voltage caused by heavy loads and keeps the electronics up.
You could rig up something similar with two banks only to draw emergency power for selected loads from the starting battery, if this was deemed acceptable.
Kind regards,
Eric
“Optimal Charge Termination
In all instances where significant charging currents are present, achieving proper termination requires monitoring both current and voltage to make an informed decision.”
This approach does not work well when the charging power available is variable: like with PV sources on a moving vessel with variable PV shading by sails and masts, which will produce output current dips that do not relate to battery SOC. Instead, I am using coulomb counting: measuring amp/hours in and out. When my bank reaches 80% SOC, I terminate charging. This requires occasional recalibration, I set 50% SOC as a floating voltage of 13.18 volts.
Patrick,
Charge termination based on residual current always works and it is the only correct way to terminate. An output current dip caused by external factors produces a corresponding voltage dip and the termination condition is not met. From a practical implementation point of view, charging is a slow and gradual process and it is common to impose that the termination condition V > V_target and I < I_residual needs to last from a few seconds to a few minutes. This further protects the algorithm from false positives.
Coulomb counting is notoriously unreliable, i.e. impossible to carry out accurately, and terminating charging “at 80%” is nonsensical. Lithium iron phosphate cells need to be recharged correctly (which means fully and without overcharging) at least from time to time when the opportunity arises in order to erase the memory effects caused by partial cycles. When this doesn’t happen, the available capacity shrinks over time and the system eventually becomes unusable.
The whole “incomplete, weak charging theory” originated from: 1/ a technical inability to correctly implement charge termination and, 2/ the operation of banks without cell balancing, which drift out of balance and start causing voltage issues near the top after some time. However, it is garbage and leads to bigger issues a little further down the track.
Eric
Where is Nordkyn now, Eric? Have you done any major passages? Also, how is your experimentation with ultrasonic antifouling going?
Hello Dave,
Nordkyn is currently anchored in Paterson Inlet at Stewart Island as I type this and the NW is picking up outside. Work/projects keep coming in the way of long ocean passages, but I have clocked the 1000NM NZ North to South and back a number of times in recent years. I no longer bother stopping much along the way, I have seen the coastline. I just sail with whatever I get some 40-50NM out where it is nice and quiet.
No further changes to the ultrasonic system in nearly a year now. Down here the sun is 10 degrees lower than in the Hauraki area and it is not good for my horizontally-mounted solar panels, so lately I took the unprecedented step of turning it off at times. The idea is having more energy to feed into the computer of course. The water is clean and cold and the antifouling is only 8 months old, but I do not like the result at all! I had a look at the rudder blade today and powered it up again right away. I think I was starting to take the result for granted, but it is a necessity for me now. I might try tweaking the low-power mode so it pauses longer between bursts and see what happens. That would be a lot better than nothing. Last time I increased both the power density and the maximum frequency and it was much better, but I can only conclude about the combined effect, so lowering the power density only would be a worthwhile experiment.
Kind regards,
Eric
Interesting, thanks for responding. What are your plans long-term for Nordkyn?
A long voyage back to Alaska and beyond has been on the cards for quite a while.
It is also looking increasingly likely that a slightly bigger version of the same will get built before too long. This would be remarkable, because the new build market has been extremely thin for ocean going yachts since 2008 and this is more a boat for discerning sailors.
That’s great to hear. Where would it be built? I assume it’s not for you and you’re happy with Nordkyn as is?
I certainly wouldn’t bother designing a boat if it wasn’t going to be built! It is only being discussed at the moment, somewhere in Europe. As far as I am concerned, I am perfectly happy with what I have got and this can be my last boat. In terms of volume and length, Nordkyn is a fairly big boat for a single-hander or a couple and it would easily carry a small family. It only gets too small if you want to carry more weight than what was intended.
I am about to install a DIY 400AH Winston (8 cell 24V) system.
I have a victron 100/50 Solar Charge controller, and a 3000/24v 70Amp inverter charger. 30A DC to DC charger
First of all I read about low current 0.05C – 0.033% (for me looking at 20A or greater when installed 8S) which means my original idea for initial top balancing of using a 10Amp power supply is out, even on a single cell but in a paralleled bank totally out.
So for initial top balance
Instead, stop the charging process, let the cells rest for a few hours, and measure the terminal voltage. When the resting open-circuit cell voltage reaches 3.35 volts (measured with a very accurate meter), you are done. Stop there!
For normal operation
I can program the changers (also have a programable BMS for cell / secondary protection)
-Solar 1300W PV array but that is max in theory, stop on voltage with no absorption? In theory sometimes it could be putting out more 20A, like twice that would I be better treating it is a larger current and have some absorption time (lower voltage)
30A DC to DC charger voltage with absorption time (at a lower voltage?)
Victron 70A inverter/charger absorption time (at a lower voltage?)
Your recommendations would be appreciated. I want to protect my investment in the battery bank.
Hello Francis,
0.033C for a 400Ah bank is 13.2A termination current, so 10A is close enough and you should be able to charge new cells up to 3.65V and stop. There is no need to make things more complicated than they are. It is just a one-off charge of a battery.
No absorption is out of the question with LiFePO4 cells. The absorption time needed varies considerably with charge current and cell health. If the bank has seen a lot of incomplete charge cycles, memory effects become very significant and lead to very long absorption times. If you are not charging up to a correct termination point, a lot of capacity becomes unreachable after a few years… or less.
I am currently carrying out some tests on clearing the memory effect on a bank which has done hundreds of partial cycles and I will release the data in an article when I am done.
Lead-acid chargers by themselves are basically incapable of charging a LiFePO4 battery properly in all circumstances where loads are also present. You should be getting the charge termination signal from the BMS and make the chargers comply with it. Fudging things sort of works for some installations, at least for a while, but it eventually falls apart when the bank can’t be recharged to full frequently enough. It is not so much about what you buy, but rather about how you design and build the system.
Regards,
Eric
Love the design. Been looking for a design that would allow me to cruise at around 8 knots in comfort so as for me to keep pace with several friends who regularly take their sail boats out on adventures to the distant islands of the Philippines where we live. I would be very interested to know more about this design. I also think this design would have a very good potential for the Philippine market. But I think a longer version should provide a better option with its faster and more efficient hull not to mention larger volume for living space.
Eric…what is the ordering information for your “prototype” board?
Thank you.
Eric…BTW, I live in Raleigh, NC, USA. My 50′ Gibson houseboat is slipped near the coast. I anticipate at least four transducers or perhaps 5-6. Would there be a “beating” problem among the sets of transducers? I am an EE and like to putz around with stuff. Could I be a beta site and help test your systems for a favorable product cost?
FYI, I was developing a system based on Chinese ultras and figured out how to waterproof them using plastic pipe fittings and couplings…yours show a nice approach/execution…congrats.
Regards,
Chuck
Hello Chuck,
In my experience with an alloy hull, a transducer is able to provide coverage for well over 20 square metres / 200 square feet, but hull material has something to do with it too. Still, 5-6 transducers for 50′ seems a lot without any other information.
I think that “beating” is more an advantage than a problem because of the constant frequency shifts. It will cause some cancellation, but also higher peaks and, as they have to shift with the frequency, I expect it to increase the peak power everywhere.
Synthetic plumbing fittings were an easy way of achieving a threaded mounting system indeed and my transducers have been installed this way since the beginning. I think that bonding them directly with epoxy is superior in all cases and I have sometimes thought about dropping the flange and the thread. For now at least, I will keep them the way they are, as they can be either bonded directly or made removable.
When I look at the cost of commercial twin transducer systems – including some of the “less affordable” ones which are plain garbage – I am not sure what you mean by a more favourable product cost! At the currently listed price, making them is a bit of a questionable proposition and this is why I only have some available from time to time.
Best regards,
Eric
I have a main bus with two contractors connected, one to load bus one to charge bus. I have a master battery switch, switching this off, disconnects power to the BMS and subsequently both the load and charge contactors are NO, and the change and load buses are then both disconnected/switched off. Having a main battery switch in this case appears to work and keep simplicity in design.
Francis,
I wouldn’t try to open that main battery switch when there is a fair charge current involved. Remember that what may seem “instantaneous” to a person can be far from it in reality…
First, the battery load disappears, the contactors are still closed (the magnetism needs to collapse, the contacts need to start opening) and the charge current flows straight into the loads circuit for a millisecond or so. Without the low impedance of the battery in the circuit, the voltage also spikes violently. Then the contactors start to open with a spark and with a bit of luck you are facing widespread damage to the electrical system already.
You are also saying it “disconnects power to the BMS”. So is your BMS fed from the tie-in between the battery switch and the contactors? What is preventing a charging source like solar from keeping power to that node after you open the main battery switch? In this case the BMS wouldn’t lose power and the contactors wouldn’t open.
In all cases, claiming that something “appears to work” is not good enough. The question is: Will it always work?
Chuck,
There is enough information available for you to make this evaluation… starting from the construction of the transducer.
Best regards,
Eric
My LFP bank was designed to sustain the essential electronics in my sailboat for 96 hours without a charging source. My only charging source underway is solar. So my discharge rate is C/96 (to 10% SOC) and my charge rate (worst case estimate) is C/48 (to 90% SOC).
Under these conditions, how does one possibly detect C/20 (0.05C) for charge termination – when that current is more than twice the charge current available? That is why I count amp/hours in and out instead. To prevent memory effect, I charge the bank to 100% SOC on a shore power charger using current taper detection (C/20) approximately every 25 cycles.
I have over 500 cycles accumulated over 3 years and I cannot detect any memory effect in my bank (400A/H 4S 4P GBS cells). The bank terminal voltage always rests (24 hours resting OCV) to 13.43 volts for an indicated 100% SOC charge, and the 24 resting OCV tracks all along the discharge curve within a few percent.
The published advice completely disregards the practical needs of sub-fractional users such as myself. Not everyone has an engine-driven alternator. I have no alternator at all. I have a sailboat — not an “wind-assisted motor boat” (auxiliary sailing vessel).
It is not because a boat has an engine and alternator that the energy comes from there. There is nothing uncommon to using solar for most of the charging, at low C-rates, and even extremely low C-rates in adverse conditions. Manufacturers specify charge termination at 3.65V when the current is down to C/30 = 0.033C and the charge rate was C/3 typically. As long as the battery is absorbing and the voltage doesn’t skyrocket, it is charging. There is nothing to get excited about. If you charge and discharge at very low currents, you will be able to access more capacity because there is more time available for diffusion processes. When you terminate charging at voltages lower than 3.65V, you also need to charge to a lower residual current to reach the same SOC anyway.
As long as you have the opportunity to recharge properly from time to time, there is no reason why memory effects shouldn’t clear easily and they do. Things become more challenging when you DON’T have the opportunity to recharge to full for very long periods and keep cycling.
You write “the bank terminal voltage always rests (24 hours resting OCV) to 13.43 volts” and so by definition there is nothing else to do about “memory effects”, because that is a full charge and possibly even an overcharge.
Coulomb counting is NOT RELIABLE because you can’t have an instrument that is going to cope perfectly with a dynamic range of current extending from milliamps to hundreds of amps. As soon as you start metering, you also start accumulating measurement errors and very quickly you have NO IDEA about what the true state of charge actually is. So common sense suggests NOT to use this information to make critical decisions, unless you also have a measure of the quality of the SOC based on how hold it is and other parameters and you can make intelligent decisions integrating cell voltage, current, estimated SOC and SOC quality. There are no “special reasons and circumstances” for ignoring this and doing it anyway, because 1/ you haven’t addressed the reason why it should not be done in the first place and 2/ experience shows that there is no need for ever doing it when you are able to periodically recharge properly.
Hello Eric…
My LFP bank is finally installed, balanced and in service, currently being charged just with shore power. The VRC-200 is configured and ready to install. I also purchased a Victron Argo diode based battery isolator. Above, you explained that a diode based isolator, on the leg charging the LFP bank, would drop about 0.4v at low charge current and maybe 0.9v at higher current, and this would drive the input voltage of the isolator higher. That, in turn, would increase the charge voltage to the AGM start battery.
While reading the instructions for the Argo isolator, it says:
“The Argo Battery Isolators feature a low voltage drop thanks to the use of Schottky diodes: at low current the voltage drop is approximately 0.3 V and at the rated output approximately 0.45 V. All models are fitted with a compensation diode that can be used to slightly increase the output voltage of the alternator. This compensates for the voltage drop over the diodes in the isolator.”
Given the voltage drop of this isolator is lower than planned, is the design still valid?
Thanks!
Hello Jim,
The voltage drop varies between isolators and with the current carried by each leg. There are additional resistive losses in the wiring and terminations, so the end result will be higher than a 0.15V difference anyway.
Besides this, the stated 0.45V drop at full current is something that remains to be seen! I am looking at a 300A-rated Schottky diode and its forward voltage drop at 100A is already 0.6V when hot and closer to 0.75V at normal ambient temperature.
The design stays valid of course because it promotes a higher and beneficial voltage going towards the SLA starting battery.
Kind regards,
Eric
Great thanks again!
Hi Eric, you’ve written a great series!
I’m currently working on a 3p8s pack using CALB 100Ah FI cells. I want to implement the circuit you describe in figure D: individual cell fusing. In CAD, I found that for these CALB cells, ANL fuses seem to fit perfectly, physically at least. What do you think of this approach, and would you recommend something else?
Hello Antoine,
Fusing the cells is always conceptually attractive and ANL fuses can indeed replace cell links quite simply in some cases, but it can be difficult to do it in a way that is actually effective, unless:
1/ The parallel blocks each contain a lot of cells; and/or
2/ The currents in the installation are always small in relation with the capacity of the individual cells
These conditions are rarely met when using relatively large prismatic cells in small installations. In your case, using a 3P scheme, each fuse must be able to hold a current of Imax / 3. This can be too high to effectively protect an individual cell, unless Imax is very small.
The other aspect to keep in mind is that there is no reason for a cell to start failing in short-circuit uniformly. It is more likely that it would fail by developing a hot spot and then the failure would progress from there. There is no guarantee that the fuse would be challenged before a hot spot could reach ignition temperature for example. I have never seen or heard of such a cell fuse blowing when used with a few prismatic cells in parallel only.
In the case of a gradually developing fault within a cell, the first sign of trouble, long before any noticeable heat is generated, is usually cell balance issues (i.e. overvoltage in charging) with most or all the healthy blocks and the installation becomes inoperable, so you tend to get a warning.
All this suggests that if you are really serious and concerned about individual cell failures within small parallel blocks, you don’t create such blocks in the first place and operate 3 independently managed 8S strings in parallel instead, because this is always the safest configuration.
In practice, experience shows that parallel blocks rarely give trouble and, when they do, cell balance issues arise long before anything else, because it only takes a very small amount of abnormal self-discharge in one cell to upset the pack. As a result, and because it is also much simpler and cheaper, a lot of people choose to operate parallel cells when seeking larger capacity. In non-stationary applications, smaller parallel cells (up to 200Ah typically) are always much better than single larger cells, because they are a lot less likely to fail from mechanical stresses.
Best regards,
Eric
Hi Eric,
Thanks a lot for your response! I appreciate that you took the time to write such a detailed answer. And indeed I bought these 100Ah cells (instead of larger ones) based on your article and mentions of mechanical stresses.
I think I will proceed without the ANL fuses, with the 3p8s configuration. I’ll follow the other recommendations you made, I just need to re-read each article another time! It’s dense with a lot of good information! For the BMS part, I acquired an Orion Jr BMS, which seems to be fulfilling the requirements that you mentioned. It was also easier to procure from California than other models.
Thanks for your very detailed articles. I have been thinking about this and have also been chatting with my old friend, Mikael Nordman who has commented elsewhere on your pages.
Like Mikael am I a great believer in simplicity so his idea of having a battery bank for the boat that you top-balance every winter has a certain appeal. Now like Mikael am I an EE so this is what I propose:
No active battery management, ie balancing, but battery protection. The battery is connected through a fuse and then a latching mosfet relay with an initial power-on state of OFF. The relay is controlled by two pushbuttons, on and off and by a circuit that measures the voltage of each individual cell. If the voltage of any cell rises above Vhi, say 4V or Vlow, say 2.5V, the battery is disconnected immediately. The voltages is something we could discuss. If the battery manufacturer claims 4V and 2.5 volts, then perhaps 3.9 and 2.6 would be better.
I have a prototype running. It is basically some precision opamps and comparators. The current consumption is less than 1mA, which should be far lower than the ordinary self-discharge.
If this turns out OK then I will open-source the design.
Comments?
Hello Anders,
The issue with what you are proposing is that not damaging a lithium battery goes beyond just keeping the cell voltages within a range, especially a range as wide as what you are suggesting and derived from specifications that were largely abandoned some 10 years ago, for very good reasons.
There is a considerable difference between “simple” and “simplistic” and implementing what you are describing here would do nothing to safeguard the battery from overcharging and destruction. At best, it would just protect you from a fire. Such a design would in fact be inferior to what you find within packaged lithium batteries advertised to be dropped into lead-acid charging systems without alterations. It would also be no different or inferior to many of the junk-grade BMS solutions you can already buy on the market for record low prices.
In order to deal with a lithium battery effectively, you need to have an idea of its state of charge and make decisions which take it into account. This is why charging, battery management and protection are ultimately a job for a microcontroller and it needs to know not only about all the cell voltages, but also the battery current, its variations over time, the charging history of the battery and the cell temperatures.
Of course you could rebalance your cells manually once a year if you feel like it. Replacing some circuitry by manual intervention is a personal choice, but, in the bigger picture, it is hardly a smart idea. We want battery systems that take care of themselves and perform throughout their life without requiring specialist knowledge and intervention, not some energy storage contraptions that requires babysitting not to go wrong.
People have tried to cut corners with lithium battery cells for a decade now and it has always worked exactly until the bank got destroyed. Overall, practices have gradually improved with better understanding of the fundamentals. There is no need to go back to the beginning now. These systems will reach full maturity with the seamless integration of protection, management and charge control.
Let me add (in addition to what I just wrote), that what I am suggesting is a circuitry for battery protection, not management. This is also for my own use or for someone with similar requirements, which are:
– Capacity approx 100Ah
– Drain is mainly fridge, navigation and lights, say less than 10A peak
– Charged from a solar charger designed for LFPs and possibly from shore at max 0.1C, again an LFP charger.
– No charging from the engine generator (which removes a lot of possible, dangerous, scenarios)
There will also be an MPU that reads individual cell voltages and count coloumbs.
The initial setup has now been in use over the summer. There is no active balancing of the cells. They were top-balanced to 3.5V in parallell in the spring, then cells were connected in series and loaded until 12.8V (3.2/cell). Autumn 2022. When measuring individual voltages (HP 3456A DMM) I got. 1: 3,3334V, 2: 3,3332V, 3: 3,3328, 4: 3,3332V.
Ie, cells (Winston) are within 0.6mV after one summer’s use.
They were charged from Solar only and used to feed fridge, navigation (VHF, GPS) and lights.
I noticed that the drop from the MPPT charger (2A) to the battery was significant and as there is no way to have aa separate sense wire, I will relocate the charger closer to the battery. The drop was enough to stop the battery from charging fully.
But the voltage range I am suggesting was just an initial suggestion, based on the data from one particular battery cell maufacturer. I agree that it is a very wide range and it could very well be made smaller. The general idea was for it to be a supervisory circuit that would be extremely reliable and to act as a last resort cutoff. It would then be augmented by a MPU that reads data from a coloumb counter and the individual cell voltages to present an accurate SOC.
Such a circuit only protects the battery from a catastrophic failure in the charge control infrastructure where the voltage would otherwise keep rising uncontrollably, it doesn’t prevent destroying the battery more slowly by overcharging it and it won’t do anything if something starts getting hot in charge or discharge. Furthermore, if it did disconnect, it would leave your “bad” charging source directly connected to your loads and fry them, which is discussed at some length in another article about electrical design. Why bother with something that is not adequate?
Virtually all “lithium” charge controllers can only sense their own charge current – not the actual battery current – so they basically can’t terminate the charge correctly because they can’t identify how much of the current is going to the loads. There is no solution to be found by trying to split and dissociate matters.
If you are going to have a MCU in the system anyway, then use it and build an integrated system. The code won’t be simple for sure, but once it is in a black box, the system can become very simple. Much simpler than the mess that always arise from trying to interconnect disjoint components that are not fit for the task.
Thank you for this interesting and informative article.
On my D2-75F, the +12V power supply to the MDI is sourced from the starter motor rather than from the battery. This would seem to make the unit vulnerable to voltage transients owing to the inductance of the starter motor. When you looked within the MDI, did there appear to be adequate protection in the MDI box against such transients?
Dear Jeremy,
As the only supply from the battery is terminated at the starter motor solenoid, this is likely to be valid for all the engines using the MDI module.
Looking at some of the key components like the NCV4269 linear voltage regulator producing the 5VDC supply, and the 63V-rated filter capacitors, the module seems to have been designed around a 60V peak supply voltage limit. A number of other parts I identified had higher voltage ratings. I didn’t find any large capacity transient voltage suppressors anywhere, so it seems quite clear that Volvo opted to design for a sufficiently high peak voltage and I also think it is the most robust option in this context. 60V should be ample considering that the cables to the battery are normally both quite short and substantial. Longer and/or undersized cables could allow the voltage to spike more at the engine, but even then the available margin seems quite considerable.
One potential scenario that could lead to the electrical destruction the MDI box is an alternator load dump caused by the loss of the battery while charging at high current. In this case, the surge could easily exceed 60V, especially with the standard Volvo wiring which also connects the alternator output (B+) to the started motor solenoid.
In most cases, it makes sense to run a new dedicated heavy cable from the alternator B+ post to the battery, or – better – to a battery isolator for charging separate banks. This normally mitigates or even entirely eliminates this possibility.
Kind regards,
Eric
Hello Jean-Francois,
There has been a French product called Mer-Veille on the market that is similar to the C.A.R.D. system, but I am not familiar with it.
A C.A.R.D. system can always be repaired, because it is quite simple and none of the components are difficult to source. The microwave detection diodes can require a bit of shopping around and different models were used over the years.
The spark from a nearby power switch normally sets it off every time, even with detection diodes that can’t see radar beams any more. When this is the case, replacing the detection diodes in the dome is frequently necessary. As I have found a number of different failed components in C.A.R.D. devices, it is not very easy to formulate general recommendations to repair them.
It pays to start with the simplest things like checking for broken wires in the plug and broken solder joints on the display PCB. Next, check for the power supply to the dome. The device operates with four identical channels each coming back to the display unit through their own wire, so you can normally swap the channels and determine whether a channel fault is in the dome or in the display module. I would start with the “bad” channel and work by comparison with the others.
I have sometimes thought about writing an article dedicated to repairing these devices, but it would represent quite a job. If you can narrow the issues down somehow, e-mail and we can discuss them.
Best regards,
Eric
For marine applications it seems there is lots of opportunity for charging such as solar, alternators when motoring, shore power.
This seems like to would result in the bank spending a lot of time at 100% SOC while you indicate keeping the bank at high SOC for long durations is not good for the bank or is your idea of long durations at high SOC more in the weeks/months range rather than say a day?
Can you clarify?
I suppose when the boat is not in use for longer periods such as several weeks the bank should be drained a bit and then disconnected?
Paul,
This is one of the dilemma when trying to use lithium batteries in standby applications. They are not a good fit to create reserve capacity for occasional events. Unless you are living aboard and cycling them significantly, there is generally no value in departing from lead-acid, on the contrary.
This idea of “keeping the battery full” that originates from the sulphation problems of lead-acid chemistry, but also aligns well with maximising reserve capacity, has to be abandoned completely. If you are not using a lithium battery, it should be stored in a significantly discharged state and then it offers very little reserve capacity.
Not keeping the battery full and not recharging the battery unnecessarily is another aspect of battery management for long term performance.
If you leave a boat connected to shore power with lithium batteries, the cells should not see any charging and this suggests keeping the system voltage constant at a low level like 12.8V or less for a 12V installation. More and more chargers can be configured to operate in a power supply mode now for this reason.
Best regards,
Eric
One thing I’m still confused about is why do the cell voltages rise rapidly with an unregulated PSU such as a battery charger?
If I charge my 12V pre balanced pack with 14.6V will each cell eventually go beyond 3.65V? If so I don’t understand why.
Are there easy ways to spot noticeable miss matched IR & AH in the cells once built into a 12V pack?
The cell voltages rise very quickly at the end because the battery runs out of lithium ions to displace (which is the reaction that happens at the “normal” charging voltages) and then the electro-chemical potential moves up towards the next reaction level where the electrolyte is decomposed around 4.2V. It is not a problem of internal resistance, it is not an ohmic effect, even though it looks a bit like it. It is asymmetric, it only happens with current flowing in and not in discharge at the same charge level.
If you charge a perfectly balanced 4S pack at a filtered and regulated 14.6V, all cells will reach 3.65V. If there is any imbalance, the sum of the cell voltages will remain 14.6V, but the maximum individual cell voltage could become much higher than 3.65V.
If the charge voltage is not properly regulated, then the cell voltages could become anything with almost zero current flowing.
Kind regards,
Eric
would this work with twin engines around 40hp each and are there plans to produce hulls for sale.do you have a cost for this hull minus engine thanks. is it possible to change sleeping quarters to make the double a island bed and sill retain 2 bunks? it seems an amazingly economical design that would suit exploring all round NZ and if it was suitable with twin engines making a fair weather crossing to Aus for extended cruising there also.
Hello Peter,
Yes it would work as a twin-screw too and this would make sense for offshore passages. Layout options can be explored, but it depends on the length of the boat. I imagine you are considering something longer than the 11-metre one with 2 x 40HP, because it would otherwise be excessive.
There are no plans to produce hulls. The over-abundance of ridiculously cheap second-hand boats means that only people who want exactly this kind of vessel and can fund a new build are in the market, and this is an extremely thin market.
The best way for you to get a preliminary idea of hull cost would be to show the design to a yard and ask them. We had estimated the cost of building a 36′ in 2014 in Poland at EUR 140Km single engine and fully finished. Labour rates are higher in NZ, but materials should be about the same.
If you become serious about this, please get in touch via e-mail.
Kind regards,
Eric
30 deg C max ambient temperature is not realistic on a boat…is it?
Average ocean temperatures peak around 28degC, so a bank installed below the waterline should be able to stay reasonably close to that in the context of ocean cruising. The hottest I ever saw the sea was 32degC close to the surface in the doldrums of the Atlantic and I wasn’t there for very long. I also had sea temperatures of 1degC in the Antarctic and excess heat was never a problem then.
Hi Eric
Love your site it is the most informative ( and enjoyable ) I have found, I know this sounds silly but I get just as much enjoyment reading it as when I used to read the old Uffa Fox books? Love your concept of a tough fast cruiser.
I look at the current crop of so called cruising yachts and despair – soulless floating caravans full of crap but that’s where the market is.
On reflection would you make any changes to Nordkyn or do anything differently. Am looking forward to seeing details of bigger version.
My only sailing these days is mostly in an armchair with the occasional excursion in an Etchell, just getting too old.
Hello Nikki,
This is a huge compliment that I certainly wouldn’t expect, thank you.
When it comes to Nordkyn, no, I wouldn’t change anything to the boat itself. It is amazing to sail. I would make very minor improvements inside. The main ones are a longer step immediately inside of the lower companionway washboard (I often step in and out with the board in place) and I would extend the little bench between the companionway and the galley further forward, so it overlaps more with the galley stove for improved bracing. This I could easily do now, but the thought of grinding fiberglass, sanding fillers and spray painting inside has been too unappealing so far.
The idea of a bigger one seems simple, and it is technically trivial, but when you assess how much you also lose in terms of increased construction cost, gear size, weight of the equipment to be handled, effort and maintenance, the answer is not so obvious any more. The interested person has now been wrestling with all this for nearly 2 years and the size keeps converging towards what I have, without ever quite getting there.
Nordkyn largely is an uncompromised boat made for sailing and it can carry a fair payload, but trying to add “features” and generally “wanting more” upsets the equation, because of the added weight. This then calls for a longer hull to carry it and the rig size – which is already considerable – steps up with it. It usually ends up along the lines of “sure, if we make it the size of a small superyacht, you can probably have everything you want. As long as you are happy to own that and you can afford it”. The market definition of value is packing as much as possible in a given length at the best price, here it is getting as much performance as possible while still carrying everything that is really necessary and the budget goes towards this goal, not “features”.
These days, people essentially buy boats from the inside out and actual sailing performance at sea is the last thing to be considered. Everybody in the industry knows that, so yacht design has largely become a form of glorified exercise of interior design and maximisation of the “features”. It is not interesting and I can think of a lot of much better things to do!
Kind regards,
Eric
Hi, I’m a couple of months off relaunching a steel vessel in the Bay of Islands, currently in a paddock near Kerikeri!
I’m keen to explore this system, and to chat to you about antifouling.
Cheers,
Ben
Hello Ben,
Results have been very good with steel hulls. A Ganley Pacemaker (42′) in the Hauraki region that hasn’t been hauled out or painted properly in 15 years installed this system and it eliminated all hard growth even with no antifouling paint. Weed growth has been a lot thinner and slower and some types of weeds disappeared. This matches very closely to the results I was having with my alloy hull when the antifouling was essentially all gone. The transducers were epoxy-bonded to the steel plating.
I would favour a relatively hard antifouling to run with this system. In the warmer waters of the north, diving from time to time for a little underwater maintenance is not much of a problem and a harder paint extends haul-out intervals.
Best regards,
Eric
Hi again Eric,
Good progress.
It’s been about 2 years that we’ve been running the system and, with 3 monthly brush-offs, went really only had tiny molluscs and some weed.
I’d be interested to know if you’ve made progress on dealing with algae, and if so whether we can adapt our system to help in that regard.
I’ve just hauled out at Waitangi, and or hull generated much interest.
You may be hearing from other yacht owners who were there when I hauled out.
Regards
Ben
Hello Ben,
My apologies for the delayed answer, I have been away in the south lately. Thank you for the feedback, this is always great. There have been developments in 2021 both on the hardware and firmware fronts with improved results against weed growth and lower energy consumption. I am also testing a very different operating strategy on my boat at the moment, but it is too early to conclude.
I will upgrade the older second generation drivers as much as they can be upon request of course.
Kind regards,
Eric
Eric:
I have, with great interest, read most of your writings on this site.
It is very generous of you to avail your audience of your narratives and conclusions. Your plain statements are refreshing.
I am not an experienced sailor, but have always loved sailing, and am grateful of your comments.
I am curious: was your prior vessel, the Yarra, a Dufour Arpege? Your opinion of the Arpege?
It appears you consider it’s seakeeping traits better than many other boats of similar size?
If you were unable to build or have built the boat you wanted, are there any production boats the size of the Yarra, in addition to her, for your purposes, for which you would settle?
Many thanks,
Mike Warbington
Hello Mike,
The Yarra was a Dufour Arpege indeed. It was an excellent sea boat (I wouldn’t be here if it hadn’t been) and it was particularly fast in light winds. It wasn’t perfect in the sense that the hull hit a speed limit around 6.8 knots on the run and it gave the vane a fair bit of work steering downwind in a seaway, but it never did anything stupid like burying the bow. It never broached too badly either, but I was careful in this direction. In bad weather, at least 50% of the result – good or bad – comes from the decisions made by the skipper.
It was quite strong structurally, but not entirely bulletproof, and it held together with the help of some specific strengthening around the attachment of the bulkheads.
Your second question is a little bit harder to answer because I don’t look at production boats these days, but I did inspect a Dufour 325GL closely for someone not too long ago and I must say that I was favourably impressed by its construction. It is a more modern design and I think it should deliver better overall performance than the Arpege with improved downwind characteristics.
Another very seaworthy older boat with sailing characteristics similar to the Arpege is the Miura, very common in South Africa and it is quite modestly priced now. It is about all I can say I think.
Kind regards,
Eric
Hello,
I am willing to install such a system on a 28 footer sailboat. This one is a monolithic fiberglass bilge keel sailboat and has a Yanmar SD20 saildrive unit. I fail to find information on the range of transducers because I would like to make sure both sides of each keel and the saildrive unit are protected. There are information given by salesmen ranging from 1 to 6 transducers. This cannot be serious.
Question: what transducer configuration should I have for my purpose?
Kind regards,
Gerard Baletaud
Concarneau
France
Hello Gerard,
Considering the small size of the vessel, a single transducer just aft of the keels should arguably be sufficient for the hull. The vibration generally travels very well down the appendages.
Sail drives are attached to the hull through the engine mounts only and don’t actually touch the hull, so I would consider installing the second transducer on the sail drive itself.
All the best and kind regards,
Eric
Hello Eric,
So you are saying that one or two keels makes no difference?
Happy seas,
Gerard
Hello Gerard,
No difference. You always want to install the transducers away from the keel(s) and main structural members. The vibration travels in the hull skin and into the appendages from there.
Kind regards,
Eric
Eric, thanks for your detailed explanations. I have a largish catamaran that I’m replacing the 1000a/h agm battery. I chose CA100 cells with a max discharge of 200amps (3 minutes) in an 8P4S config to deliver 800 a/h’s. I have a single 4 cell active bms. Costs aside, would you suggest no fuses, or fusing individual cells, or a block of cells, or splitting into 2 x 4P4S in parallel with/without fuses and a 2nd bms?
Stephen,
It is a question of personal choice as each option delivers a slightly different outcome in terms of resilience and possible failure modes.
It is very problematic to effectively fuse parallel cells when using small numbers of cells, unless the prospective individual cell currents are very low in comparison with the capacity of the cells, i.e. small fuses can be used.
I have never seen or heard of such a cell fuse blowing, probably because they are almost invariably too big and cells don’t normally fail into a sudden short.
A dual-bank system, like 2 x 4P4S in your case, with two BMS provides full redundancy. I generally don’t favour the full redundancy / two-of-everything approach on board cruising vessels because of the increase in complexity (and often weight) coming with it; very simple workarounds are often available in the highly unlikely situation that something would actually happen unexpectedly. In the case of a house bank, a severe failure can be mitigated by disconnecting it and bridging the system to the engine starting batteries.
Best regards,
Eric
Great ideas about the MDI box, thanks!
The LCD panel on the MDI Panel Tach module (VP p/n 21628160) on my VP D1-30B has failed. I would like to replace just the LCD module a la the old VDO tachs but am having a very hard time finding any reference to source the part. Can you help?
Hello Royce,
The link between the MDI box and the EVC tachometer (Volvo Penta Multilink cable) uses the J/1939 automotive protocol over CANbus. It should generally be possible to replace the EVC tachometer with a generic J/1939 engine data display (search for J1939 display). Another way is bridging the data to NMEA2000 and display it with other marine data, but this is more suitable for vessels already using a NMEA2000 instrument system.
You can find information about bridging and the messages used by the Volvo Penta EVC engines (to assess display compatibility) here: https://www.yachtd.com/news/j1939_volvo_penta_evc_gateway.html.
Kind regards,
Eric
Dear Eric,
Congratulations Sir, few people can design their own boat and come up with such an amazing and professional looking product. I have really enjoyed reading your blog, inspirational!
I wonder, you have used fewer stringers than I have seen in other pics of Al construction. I guess you have gone for toughness over weight saving, would you have saved much weight with stringers, did you consider this?
You have amazing blue water cred yet you defy popular trends; no dodger/shelter, no bimini/surface for solar panels, no wide shallow open cockpit space for lounging at anchor, I’m guessing there are good reasons for these things. Will you fit a dodger for Alaska and such inhospitable places?
Did you consider reducing the cord of the keel near the bulb to reduce pressure there?
Did you consider a lifting keel in a centre case, (same no compromise shape and weight/ bulb), (lifting transom hung spade(s))? (This is my ambition and dream but I have no idea of the engineering or practicalities. I sail an E 770, sailors boat, hull shape and concept not dissimilar to yours but small scale and with just 350kg in the bulb the lifting is relatively trivial.)
Did you make that beautiful sailing machine in sleepy Oamaru, near the Little Blues? Looks like that in some of your pics.
Appreciate your feedback. Thanks
Best
Ross
Hello Ross,
Thank you for writing. The stringer spacing is a function of the hull plate thickness, frame spacing and curvature of the hull in the area. A round bilge hull is intrinsically a lot stronger than a chine one and requires less stringers. Everything is also designed to withstand the local design pressure and, as this is partly a function of vessel displacement, a light vessel doesn’t require the same structure that would be found on a heavy displacement hull of the same length. There were also constructional considerations because thin plates distort a lot more with welding, so I investigated a few different options with regard to framing and plating and decided to keep a bit more thickness in the hull plates. The difference in terms of weight was not much, but a slightly thicker hull is much more difficult to dent or breach.
It was beneficial to have a parallel shape for the keel foil as it is slotted into the hull and floors and it had to be able to be inserted after turning the hull over. The interactions between the planform, the hull, the bulb and the centre of pressure are complex and strength is an extremely important aspect in the design of such a keel. Having a continuous, unwelded plate on each side of the foil was far more essential than a tiny hypothetical gain originating from a different planform for example.
I did very briefly consider sliding the keel up, but no matter how you do it, the mechanism adds significant weight to the boat and the same weight is best placed in the bulb. It is also a lot more fragile, complex and costly than a fixed welded keel, for very little benefits because I hardly ever faced draught constraints in my travels. I do not like shallow water and/or being very close inshore, because there is no margin and/or warning if something unexpected happens. A transom-hung rudder loses the end-plate effect of the hull and is a lot less effective.
You need to remember that “popular trends” are not set by people who sail according to my definition of sailing, and sailing ability is in fact a long way down the list of their priorities – otherwise the boats would not look the way they are.
I personally find the cockpit the least desirable place where to be on board and, when I am there, it is for manoevring and I want to be able to work efficiently and see what I am doing. When there is nothing to do, I stay inside where it is far more comfortable, I don’t get fried by UVs and I have excellent visibility through the windows. On a great many boats, the dodger is such a hindrance for line handling and operating winches that they can no longer be sailed efficiently and you can’t see forward from the helm any more. I don’t actually see the point of having a dodger for sailing the way I do. The sliding hatch comes back far enough to protect the companionway in most conditions and it is possible to sit there, almost outside and still protected.
The other aspect is windage and seaworthiness. Every time you increase windage, the upwind angle deteriorates. In a breaking sea, anything and everything exposed on deck is candidate to be carried away. In heavy weather, the sea can wash over the boat and run off unimpeded and there is nothing to worry about. It would be great to have more solar panels at times, but the present arrangements can withstand any weather and don’t impact the boat’s performance and this is far more important.
I built in Bluff as circumstances were favourable at times and all construction photos are from Bluff as a result, but I have been coming to Oamaru for a number of years.
Kind regards,
Eric
Hello Eric,
I have been going over all of your information here while I design and build my own LiFePO4 bank. Firstly, thank you for your kindness in sharing all of this with the world! I am sure everyone who reads it can agree it is a wealth of knowledge and it appears to have helped many people.
I am considering the Lithium-Lead Acid hybrid style configuration you suggested. I can see in theory how this might work. Have you done any testing on this design? Do you have any further feedback? What about capacity ratio between the banks? Long term effects on the LiFePO4?
I am going to install a 400ah LiFePO4 bank and I like the simplicity of keeping my lead acid starter battery and just putting it in parallel. My starter battery is a Duracell group 24 marine starter battery with 800 CCA.
My alternative design is more complex in which I use the dual bus design you have mentioned. I still keep my starter battery but it will be charged from a DC to DC converter off of the lithium bank. The alternator from my engine will go directly to the lithium bank charge bus. This design seems better but more complex.
Any thoughts?
Thank you!
Hello Jason,
The lithium/lead-acid hydrid arrangement is a configuration some people use practically. The lead-acid capacity is hardly relevant, because by the time you start discharging it at 12.8V or less, the lithium is very low and the objective is operating a lithium battery, which is easy to recharge, not a lead-acid one. It has no effect on the LFP battery provided you charge the combined bank like a LFP battery, but it is more “lossy” because the lead-acid batteries waste some energy when charging and this one is not available for absorption by the lithium cells.
If you were to simply wire your lead-acid starting battery in parallel with the LFP house bank, you would no longer have a dedicated engine starting bank and this would be something to think about.
The choice of topology is influenced by what situation you need to protect against.
Kind regards,
Eric
Hello, I am trying this circuit using IRF540 MOSFET. but after working 5 seconds the 3A fuse is blown out. I think there is a problem in transformer winding. I put only total 8 turns (4 + 4 with center tapped 14 x 0.20 mm cable). Please guide me.
Hello Subrat,
You are referring to the original Silicon Chip / Jaycar circuit, not this one. They used MOSFETs that are no longer available and relied on their avalanche rating to handle the back EMF from the transformers. I didn’t like this design. Chances are that you could be blowing a FET by exceeding its VDS voltage rating and then blowing the fuse into the resulting short for this reason.
Mistakes in the transformer primary winding are usually fatal because if the ferrite core saturates, the transformer load turns into something close to a dead-short. It is a push-pull arrangement and it only work if the current direction is alternates correctly in the cycle.
Kind regards,
Eric
Very very thanks you for your response. I understand the push pull arrangement. I checked it is correct direction in winding.
My doubt is in MOSFET (IRF540) and also in primary winding turn. Can I use MOSFET IRF540 in place of original one.
I use 4A fuse, the circuit is working, but the MOSFET got hot slightly, need heat sinking. The original Silicon Chip circuit has no heat sink.
If it is possible; can you give me your circuit (with transformer design). I am very much interested to build this circuit.
Hello Subrat,
Remember that you only have 5V available to drive the MOSFET gate from the PIC12F675 outputs, so you need to use a logic-level device that can turn on fully at 5V already. The VGS specification of the IRF540 is a bit high for that and the transistor will get hot if the channel is too resistive. If you compare the datasheets, you will see that an IRL540 would be a much better choice for example.
It sounds like your circuit is otherwise working, so congratulations for building your own version. One day I might publish my design and the firmware going with it, but I have too many other things to do at the moment.
Best regards,
Eric
Thanks you….
Eric,
Thank you for the feedback. What you are saying makes a lot of sense to me. I am seriously considering it as an option still because I like the simplicity of it and I really like the idea that if the LFP bank fails for some reason we still have the starter battery to operate with.
What would the concern be for using the combined bank as a starter bank? I understand that LFP is more than up to the task of starting engines. Is this correct?
I have another question I would like to ask you. With solar, I plan to charge until I reach an upper limit then stop charging and start discharging my LFP bank to keep it as healthy as possible. This normally would mean cutting off the solar controller even if its the middle of the day. What I wonder about, is there a way to continue to feed the house power needs with the solar controller without charging the LFP bank?
I want the LFP bank to go into discharging as soon as it hits a high level but I do not want to waste the available solar. Any advice on how you might manage this? Is it even really needed?
I cannot think of a simple way to handle this. I am considering using programming to current limit the solar controller to whatever the house is demanding minus a tiny amount so that at least some power is being pulled from the LFP bank to keep it always discharging after it has been charged. Thoughts?
Thank you
Jason,
Of course a LFP bank will crank an engine without issues. The problem with a single combined bank is that you have all your eggs in the same basket. If you run it flat, you can’t crank the engine any more. Building a hybrid lithium/lead-acid bank requires a small additional dedicated lead-acid capacity by definition.
With regards to your solar charging question, you just need to drop the charging voltage below the point where LFP cells can no longer charge to full, i.e. about 3.35V/cell. If you want the bank to start by discharging somewhat, adjust this voltage even slightly lower. You can normally achieve that by programming a profile with suitable voltage regulation levels. The challenge is more in the direction of obtaining a correct charge termination.
Best regards,
Eric
Space constraints may suggest that “Flat on their Sides” (FotS) is preferable in some cases. However, in this article, it is stated:
“Installing them flat on their side is out of the question in all cases.”
Can references be provided to back this statement? Does capillary action not keep the electrolyte distributed sufficiently homogeneously? Are there obvious phenomena in either manufacturing or normal usage that give rise to the presence or development of (non-vented) gas, (slowly) rising by buoyancy, subsequently de-wetting/insulating/disconnecting parts of the electrode “sheets”? What would be the influence of a permanent moderate clamping pressure that is homogeneously applied across a FotS cell outer surface?
Thinking out loud: Would installing cylindrical (e.g. 18650) cells on their side then also be out of the question? Assume similar electrode- and electrolyte material, parasitic reactions, and gravity. The wound structure would seem to provide a more stable internal geometry, possibly delaying gas collection at the top w.r.t. FotS prismatic cells, assuming tight manufacturing tolerances during cell assembly. Yet, with the passage of time, they too may suffer deterioration similar to FotS prismatic cells.
Johan,
I queried the matter directly both with Sinopoly and CALB and the answer was categoric each time: installing the cells flat on their sides would cause the upper plates to run dry.
There is no free liquid electrolyte in LFP cells – all of it is absorbed – and there are voids in the top of a prismatic cell where the connections are made to the terminals. The amount of electrolyte present is not sufficient to fill these voids while also keeping all the plates wet. This problem doesn’t exist in small wound cylindrical cells.
I know that it may be tempting to install prismatic cells on their sides in some cases for geometric reasons and early EV installations even showed some mounted this way, but it is out of the question unless the manufacturer specifically indicates that it can be done for a given model of cell.
Best regards,
Eric
Hello Sir, I used IRL540 (logic level). it works fine. thank you for your suggestion. I am very curious to know your design. Which MOSFET you have used.
Dear Subrat,
I had used IRL540 FETs on my prototype unit. Most electronic component distributors will help you with finding better transistors by letting you specify the limit parameters you need for the application (VDS, VGSth, rDSon, etc). You don’t need to copy what I did and – in all cases – my hardware has now diverged quite a bit from the starting point and the firmware is very different.
You built a working circuit on your own, so congratulations. Not everyone can do that.
Best regards,
Eric
I’m a little late to the party here, but I have to ask: how often should a full charge be accomplished to wipe memory effects before they become permanent? Once a month? 6 months? a week? I’ve got 3 55A Midnite Classic 250s charging my 50kwh LFP bank w/ a Radian GS8048 inverter. I can adjust the bulk and adsorption voltages & time, and turn off the float.
Nothing I have allows me monitor current and get that information into the Midnites or Radian in a useful way.
The only way I can see accomplish a periodic full charge is to set the equalize function to 3.6v/cell and the time to a value I establish w/ a current monitor to when the charge current gets to 0 or near 0 and then have it repeat once a week/month/etc.
If you have any ideas I’d love to hear them.
Thanks
David,
Memory effects don’t become permanent, they just become more difficult to overcome. Your question is difficult to answer because there is not much data available and it depends too much on the operating regime of the bank. Performing a full recharge once or twice a year would appear to be quite enough in most cases.
If you can’t monitor current and use this information, you can’t achieve a correct charge termination. The absorption time varies a lot with the condition (and age) of the cells, so trying to deterine a fixed absorption time is a flawed strategy. You must use voltage and current.
Trying to charge LFP banks with lead-acid chargers doesn’t work properly. The BMS must measure the current and be able to control the charge termination.
Best regards,
Eric
Eric,
I am having trouble sourcing the link busbars for my cells. I purchase 16 100Ah cells and am going to place them in 4P4S configuration. I have a total of 16 link busbars but need more to accomplish the goal.
I see that you recommend solid copper or aluminum. What about concerns in flexing from the cells and stress placed on the cell terminals?
I will be using 1/4″ aluminum plate and threaded rod to create a compression case for the cells but I still wonder about movement. Even a small amount of movement between cells would put stress on the cell terminals if the busbars were rigid.
I have 1/8″ x 3/4″ solid copper bar and am considering using 2 of these stacked on top of each other to make a 1/4″ x 3/4″ busbar. Thoughts about this approach?
Thank you
Jason,
LFP cells in our type of application behave like cold, inert blocks of plastic. If they don’t, it means that some serious damage is being done to them internally and stress on the terminals would be the least of your worries then.
The resistivity (ρ) of copper at ambient temperature is typically given as 1.72 x 10^-8 Ωm. The resistance R of a conductor can be obtained by calculating R = ρ x L / A where L is the length of the conductor and A is the cross-sectional area.
So, for a single 1/8” x 3/4” copper bar 1” long, we would get R = 1.72 x 10^-8 x 0.0254 / (3/4 x 1/8 x 0.0254^2) = 7 μΩ. As you can see, this value is ridiculously low and there would be no point in stacking two bars. In fact, the second one might not even contribute much because the resistance of the connection between the two could easily be much higher.
If you instead used a piece of marine-grade 6063-T5 aluminium flat bar, the resistivity of the material would be about 3.2 x 10^-8 Ωm (ASM Specialty Handbook Aluminum and Aluminum Alloys), so not quite twice that of copper. This suggests that 1/4” aluminium flat bar would be a better choice for making the busbars in general, harder, stronger and cheaper than copper.
Best regards,
Eric
Eric,
Thank you for your response. I hear that there is little concern about movement between cells so solid bar should not be an issue.
I am a little bit confused about your statement that the aluminum flat bar would be the better choice. Is this based only on the facts that it is harder, stronger, and cheaper than copper? Since copper has a lower resistance, if they were equal in price, or in my case I already have 1/8″ x 3/4″ copper, wouldn’t the copper be better? The strength and hardness do not seem like that are very important in this application. Perhaps I am missing something here.
My concern with using just the single 1/8″ x 3/4″ comes from the rated ampacity of such a bar. According to https://www.copper.org/applications/electrical/busbar/busbar_ampacities.html the cross sectional area is 119.4cm and a rated capacity of 215 amps. I have a 400Ah bank with the potential to pull up to >233 amps at any one time based on my 2800 watt inverter as well as the various DC house circuits, I would think that a higher ampacity should be called for.
I seriously doubt that I will ever even come close to that level of output but I would prefer to error on the side of caution when sizing wiring and busbars.
Jason,
Copper is quite soft and 3mm if a fairly thin flat bar, which needs to be clamped down very well at each terminal with a stainless steel bolt and locking washer. You will no doubt use the copper because you already have it, but a 1/4”-thick aluminium flat bar is more robust. Copper makes a better conductor for the same cross-section, but doubling the cross-section and using aluminium is no issue here. A lot of power distribution cables are aluminium for the same reasons.
I have issues with your source above on the basis that the cross-sectional area of a 1/8” x 3/4” bar is 3mm x 19mm = 57mm2. “119.4cm” is a length and it is non-sensical in this context. Based on the resistivity R = 7μΩ/inch we calculated earlier, at I = 250A the busbars would dissipate P = R x I^2 = 0.44W/inch. If you were going to sustain this kind of current for long periods, a case could be made on the basis that you don’t want them to gradually warm up the cells over time, but it is not going to make any difference whatsoever if you occasionally peak at 250A for short periods. When it comes to a busbar actually “failing”, even a hit at a few thousands of amps wouldn’t be enough to achieve that and it would blow the protection fuse long before the bars would have a chance to heat up.
If you made your busbars out of aluminium, you would not be restricted to a narrow width of 3/4” only and they would in fact have a much bigger cross-section and be able to handle more current for less temperature rise.
If you stack your copper strips, you will need to sand them bright at the connection points and be very careful to achieve good conduction through the joint and it might still not last over time in a marine environment.
I once saw a lithium bank that was exhibiting unmanageable cell balance problems just because one cell in one parallel block wasn’t contributing properly: excessive resistance in the connection, and yet it was bolted tight. It came right after sanding all the faces bright and reassembling and this is why I would choose a solid bar rather than trying to use small copper strips. 3/4” is barely wide enough to be attached with M8 bolts.
Best regards,
Eric
Eric,
All great thoughts.
I hadn’t really thought about the cross sectional area until you pointed this out. You are correct that the area they give makes no logical sense. Their current capacity still seems to hold against others with similar charts however. https://bralpowerassociate.blogspot.com/2013/10/busbar-size-and-calculation.html This site shows a 20mm x 3mm bar at 225A.
I would prefer to not source something different since I already have the 1/8″ x 3/4″ copper but ultimately I am looking for justification for using it. You are making a lot of solid points which lead me to consider just going with the aluminum. Your point about good conduction in layered copper makes me wonder if the original busbar straps that came with the batteries would be ideal or if aluminum is actually a better replacement for those too since they are just 6 layers of copper.
Thank you again for making me dig deeper and do my research!
Eric,
I have another question for you as I am currently top balancing my cells. I have them all connected in parallel and attached to my Voteq HY1530EX power supply which has a rated output of 30A. The resting voltage of my cells in parallel is 3.298V.
I set the voltage of the power supply to 3.45 volts while disconnected from the cells then set the current limit up to somewhere around 80% based on the dial on the front of the power supply.
Once I connect the power supply I am seeing a current draw of only 8.6A. I have verified this with a separate amp clamp meter. The voltage once connected and measured at the cells is pulled down to 3.318V.
I was expecting more current to be pulled from the power supply at least for some period of time. I have been running at around this current for about 6 hours total. Does this seem normal?
Thank you
Jason,
It just means that the cables you are using to connect the PSU to the cells are not heavy enough to carry more current when the source is at 3.45V… You are losing ΔV = 3.450V – 3.318V = 132mV between the PSU and the cells while running a current of I = 8.6A, so your cables have a resistance R = ΔV / I = 0.132 / 8.6 = 15mΩ…
Low-voltage, high-current regulated charging sources tolerate very little resistance in the conductors because there isn’t much difference between the resting voltage of the battery and the charging voltage in the first place. Use short heavy cables or get the PSU to regulate the voltage at the cells, some have a sensing input for this.
Best regards,
Eric
Eric,
I had been using smaller cable but just went up to 2/0 (00) AWG cable.
I disconnect the PSU then power it on and measure voltage at the ends of the cables which should account for cable loss. I set the voltage to 3.445V at the ends of the cables. I connect the cables to the 16 100ah cells. I check the voltage on the cells and it is 3.318V. The current is now 10.8A.
Unfortunately, my PSU does not appear to have any voltage sensing.
Jason,
The quality of the connections at each end of the cables is just as important. You can directly measure between the ends of each cable with your multimeter, or between a terminal itself and the cable and you will see how much voltage your are losing and where.
Keep in mind for later that any resistive connection in a high-current installation can turn into a hot spot and result in melted insulation and equipment, I have seen many of them in DIY lithium systems, all because the workmanship wasn’t good enough. When the current density becomes high enough, only very finely stranded cable can be crimped and provide enough contact area not to heat up, or the terminals need to be soldered.
Eric
Eric, fantastic job on your site. I have had a number of questions in mind regarding my lithium installation and your site as well as a couple others made me realize my questions were valid and I’m moving in the right direction!
In particular I have been working through understanding the actual configuration of my cells. The quality of connections, the arrangement of cells, and how well a BMS can monitor the pack (given the quality of installation) has been my biggest question. These notes from above posts nailed part of what I was concerned with.
“I once saw a lithium bank that was exhibiting unmanageable cell balance problems just because one cell in one parallel block wasn’t contributing properly: excessive resistance in the connection, and yet it was bolted tight.”
“Keep in mind for later that any resistive connection in a high-current installation can turn into a hot spot and result in melted insulation and equipment, I have seen many of them in DIY lithium systems, all because the workmanship wasn’t good enough.”
I have been trying to decide whether to arrange my parallel cell blocks 1) with half the cells in one line and the second half in a second line, or 2) whether to align the cells in 4 lines (generally like your diagram D, whether or not the fuses were included). In the first case there would be only one connection between the 1st and 2nd cells in series, and one connection between the 3rd and 4th cells in series. One could still have multiple connections between blocks 2 and 3 because the cells in those blocks are adjacent to each other.
In case 1, I would think a poor connection between any of the parallel cells within a block could cause troubles for one or all of those cells. Even though all of the cells would be connected in parallel, the lack of a good connection (or an intermittent connection) could create an imbalance between the cells in the block. In addition, only one connection between adjacent blocks could put stress on the cells in that block that were well connected, particularly the cell with the busbar connection to the next block of cells.
In case 2 (like diagram D), each cell in each of the blocks would be adjacent to cells in the next block so a connection could be made at all parallel terminals.
I guess, in short, case 1 seems to be an arrangement more likely to cause problems with a battery bank because there are limited connections between cell blocks where as in case 2 there would be as many connections between blocks as there are parallel cells in each block so the current would have more cross-section to pass to the next block. Have you considered the difference between these 2 installation configurations and whether one is better than the other? Maybe this topic has been covered elsewhere but I haven’t seen any conversation about it. I’m not sure if that’s because it is common sense or because there are no major problems with either configuration or if I just searched the wrong words on Google and in forums! 🙂
In either case the bank positive and negative cables are connected to only one cell so the connections on all of the positive terminals and negative terminals of the 1st and last block, respectively, need to be high quality.
Chad,
The simple answer to all this is that the connections must be good and then it matters little how you arrange them, unless you run very high currents and voltage drop in the cell links begins to matter. In this case, the circuit geometry needs to be considered. For example, if you have a block of 4 cells in parallel linked by two straight busbars, you want to connect it from opposite ends to keep the total length of busbar to each cell the same. This is not normally an issue for marine house banks because we run fairly low C-rates anyway. In high-power applications like EVs, it makes a lot more sense to use higher voltage packs and keep the current down… so I didn’t elaborate.
You could use flat plates suitably drilled to link cells and achieve higher cross-sections in the connections, but it will make no difference if one cell connection is poor for some reason. This is why it is very important to sand the faces of the terminals and busbars bright before bolting them together. Some years ago, I worked in an industry where we were running nearly 200kA through aluminium busbars all the time and we had investigated the best way to achieve good bolted connections: sanding the mating faces bright was better than polishing them and flatness and pressure were essential of course.
Eric
How do you develop relation between State of Charge and Battery open circuit voltage? Is there any direct formula for that? Any rule of thumb (if it exist) ?? I need to draw similar graph with 2 cell LiFePO4. Can anyone please help me. Thank you
Bishal,
You need to measure it, it is the only way and it should be done for a single cell. It takes a long time because you need to charge and discharge in incremental steps and wait for the open circuit voltage to stabilise afterwards each time. The relation appears to also change as the cells age, more for some cells than others.
Best regards,
Eric
Thank you Eric for your reply and for the article.
Thanks for the article, I am on my Third MDI, Two were replaced by the previous owner and 1 by me and I only have a total of 150 hours on the Volvo Penta 55s. I like the idea of relocating the MDIs away from the Engine and will look into the feasibility on my boat.
You did mention the ability in a crisis to bypass the MDI as my Windlass would not work without the Starboard Engine I would be very interested in learning how to do that.
Stephen,
The article does describe how to start the engine without the MDI module: make an external connection between the “BATT” post and “PREHEAT” or “START” on the MDI box to respectively preheat and crank the engine.
Make sure all your windlass wiring originates from the battery and doesn’t under any circumstance go to the engine or share any current path with the engine cables. Each time you stop the windlass motor, a voltage spike is produced and it is essential that it is routed back directly to the battery where it can be absorbed.
Best regards,
Eric
Hello
after just 18h (8 quick sea trails and tests) of running our D2-60 the MDI box had to be replaced by Volvo. Do think in this short time the capacitors really could be a source of troubles? In our case it must be another “source of pain”. What do you think
Best regards
Lorenzo
Hello Lorenzo,
Clearly not, capacitor failure is a long-term ageing issue. Electronics are most likely to fail either in very early life (component or assembly defects) or from age-related problem after a duration depending on the environmental conditions.
I wouldn’t worry about it unless the replacement one also fails in short order, except if there is something unusual/abnormal in the wiring of your engine. Some people have reported MDI box failures in relation with ground-disconnect relays that were added into the standard wiring on metal boats. Electrically insulating the whole engine from the hull is a far more sensible and effective approach in this case…
Best regards,
Eric
Eric, great article which I used during planning my installation a few years ago. I think there might be another aspect of protection that needs to be addressed when using the parallel lead acid (LA) battery via a charge splitter.
In this configuration the load bus is isolated from the LA battery. Should the voltage of the lithium battery fall to the level that the BMS activates a low voltage cutoff event, then the load circuit has no capacitance to absorb any disconnect spikes that might occur when, for example, a large inductive load is operating. As an example, the windlass might cause the voltage to drop and disconnect. Without any fly-back protection the significant stored energy in the windlass could send a large spike through the entire load bus. If you’re lucky, the sensitive loads will have in circuit protection and their fuses will blow. Devices without adequate protection may be destroyed.
John,
Yes, you are correct. If the load bus got disconnected while the windlass was under load, it would result in a negative spike on the load bus and it would have the potential to harm some other devices. Windlasses are well-known trouble-makers on board in terms of injecting strong transients in the electrical system and they require careful wiring, but a fridge compressor would do the same to a much smaller extent. Conceptually, clamping this reverse voltage spike requires one or more diodes conducting between the ground and the load bus at that time, but, in the case of a windlass, the amount of energy to dissipate is quite significant and the best would be to prevent the problem from occurring in the first place.
Thank you for this observation, I will update the text to cover this issue.
Kind regards,
Eric
Hello Eric,
Thank you for sharing all of this most valuable information; I have read everything on this site (as well as a lot of your comments in forums) in regards to hull design and how different forces come into play in heavy weather, and it has truly taught me a lot. It has challenged some of the popular (mis)conceptions out there as well as reinforcing some of my own feelings on certain ideas. I have long been doing hardstand tours and, since happening upon this site, have been able to garner a lot more from this practice. The same can be said for observing wave patterns made by boats as they enter or leave the marina.
The point of all this is trying to educate myself as much as I can before making my own yacht purchase. I am bound by a fairly low budget (~$60k — alas, no Nordkyn for me just yet), and have some fairly specific criteria to consider in the design department. If you have the time, would you share your opinions/estimations/reservations about a few (locally) well-known boats? I would find it most valuable — primarily for my ultimate cause, but also to apply some of this theory to hulls that I already know (which may be interesting to others as well).
– Farr 1020, 11.6/38, 1104 (IOR distortions) and 1220
– Beale 33 and 11.2
– Van de Stadt 37 (hull too deep behind keel then rising too steeply aft?)
– Lotus 9.2 (rudder), 950 and 10.6 (something iffy about the stern?)
– Young 88, 11
Some of these are slightly out of my price range, but I’d still appreciate any of your thoughts on any of these boats (or any others) if you have the time.
Kind regards
Daniel
Hello Daniel,
Thank you for your comment. There is lot to be learned indeed from visiting hardstands and talking to the sailors, especially when there is quite a modern, competitive fleet around. I couldn’t comment on designs without having a close look at the hull shapes and it is not automatically easy to find suitable views for each of them. I don’t have the time at the moment to try and get such data either and it is not where my interest lies anyway.
Old IOR boats are usually best left alone because of their poor downwind characteristics, and even more so for the later ones with distorted hulls. Many had discontinuities faired out afterwards because of the course stability and steering issues they caused. The only good thing about IOR is that it was such a fiasco that it is unlikely to ever be repeated again.
The Farr 38 is a boat I have seen up close, old design, but quite a nice hull. The deadrise in it has no advantages and leads to somewhat slack bilges and less stability (and power) than it would otherwise have. Many of them were built in South Africa in fibreglass and they were of excellent construction.
The rudder arrangement of the Lotus 9.2 is atrocious and a few years ago I actually assisted with the design of a new one for a boat based in Nelson. We eliminated the skeg completely and reduced the lateral area, using a transom-hung blade, and it was a new boat after that: speed and manoeuvrability. The rig is also too small, but it is a different issue. It is a hull with good handling characteristics.
A Beale 40 took me on a couple of years ago just as I sailed out of Islington Bay at Rangitoto. It had a clean hull and a crew of three, dead keen. Stiff southwest, 20-25 knots. I was only going a few miles upwind (Orakei) and hadn’t bothered with a headsail, so just hauling upwind steadily and tacking under full main at 6 knots or so. They tried everything: pointing higher, lower, trimming one way or another. No answer, I just pulled away steadily at every tack while standing in the companionway with a cup of tea. No idea what is wrong with it, but it was a ridiculous show and I don’t think I would even bother looking at the smaller ones.
The Youngs could be more interesting than all the others.
Kind regards,
Eric
Hello Eric,
Thank you for your reply. Apologies: I did mean, but failed to say, only if you already had opinions of them.
I hadn’t actually seen a Farr 38 out of the water before, but after reading your comment I did find some pictures online and I can certainly see what you mean about the deadrise angle and consequent slack-ish bilges. I have only one picture of a 1020 out of the water but it looks like it may be similar — I will investigate further.
Currently on Trademe is a Lotus 9.2 that has been extended ~400mm and now sports a Wright 10 rig; a very interesting prospect, though I can’t quite make out from the pictures whether the rudder has been modified or not. Good to know that that particular issue can be successfully remedied though. The hull is over 40 years old now, which isn’t ideal, but is priced accordingly I suppose.
The Beales are interesting because they look like they should sail well, but yours is the second account I have heard detailing one performing in an underwhelming fashion: the other was from a guy I got talking to who had built one — a 31, I believe — as a racer but couldn’t get it to plane in conditions where it would have been otherwise expected. One thing I have noticed on the hard is that they often *appear* to to be deepest (slightly) just aft of the keel; though far from uncommon in other designs, I understand that this is less than ideal. I’m really not qualified to speculate, but it does intrigue me as they are a nice-looking hull otherwise.
The Youngs generally perform very well from what I gather, but I have no first-hand experience with them. Certainly for their day they are competitive, though I get that this does not automatically translate to good heavy weather behaviour.
Something I have been pondering for a while is how, in design, you achieve a well-balanced helm. Or, maybe more to the point, how you would achieve an imbalanced helm. I’ve noticed that some boats need a lot of windward helm when sailing upwind in a breeze, which obviously generates drag, but I cannot quite comprehend the cause. Initially I thought it might have a little to do with rig balance and the placement of the mast, but that can’t be the entire solution. Is it simply the arrangement of the underwater appendages in relation to each other and the WLL, such as the keel being too far forward?
Thanks again for sharing your perspective.
Kind regards
Daniel
Daniel,
The Farr 1020 doesn’t have a discontinuity on the centreline astern. Forward of the keel, I don’t know.
Extending a Lotus 9.2 is a good idea as it would improve the flow around the stern at speed. Having the transom on the waterline or even slightly immersed is hardly ever a good idea, it increases wetted surface and most yachts are just not fast enough to benefit from it. Here, it would also allow transforming the transom-hung rudder into a spade underneath the hull. Having an immersed surface above the rudder and a very small gap increases its apparent aspect ratio and effectiveness compared to a surface-piercing rudder.
When I was watching the Beale 40, the exact same thought crossed my mind: it looked like a boat that should sail acceptably, but it was a tub. Copying the looks is not enough.
The curvature of the lines in the hull, the buttocks aft in particular, and its position are very important. Every time the flow gets deflected, it produces a high pressure zone on the convex side and a low pressure zone on the concave side of the streamlines. This explains the bow wave and curving the run of the lines aft causes a low pressure in this region to appear and it depresses the free-surface. The stern gets sucked into a hole as a result when the speed increases. One particularly awful example of this is the Hallberg Rassy 44 (https://sailboatdata.com/sailboat/hallberg-rassy-44) where they clearly wanted to lower the engine to gain interior volume.
Balance is something discussed above already and it is a lot more complex. Hull shape, the position of the rig and its height, the appendages and stability all have a role to play. Weather helm arises from having to produce a force-moment with the rudder that cancels the force-moment produced between the resistance of the hull and the driving force from the sails to keep the boat on course. A balanced design is a design where the driving force tends to stay quite closely above the overall resistance force.
Kind regards,
Eric
Hi Eric,
Thanks so much for your in-depth explanations of how hull design parameters affect various performance aspects. You’ve put down a real wealth of information here.
I’m wonder if you could go into a little more detail regarding the convex/concave shapes and subsequent pressure distributions. You mentioned the HR 44 and I do see how the engine sits low in the hull, and the lines are somewhat deformed to accommodate it, but it still appears that the overall lines of the canoe body are convex.
Thank you!
Geoff,
When you curve the streamlines in the flow around the hull, a high pressure region forms on the outside of the bend and a low pressure one inside. At the bow, the water must part and start flowing around the hull; the high pressure region is located towards the hull and it produces the bow wave. Once the water gets past the deepest/widest part of the underwater hull, the streamlines must find a way to come back together behind the hull. If they have to follow a convex hull shape, then the pressure will drop close to the hull (inside of the curvature) as the flow curves along the surface.
This pressure drop tends to promote a detachment of the boundary layer (the turbulent layer of water very close to the surface of the hull) and it can result in a complete detachment of the flow from the hull. The faster the hull travels through the water, the more severe this phenomenon is and a velocity threshold is found where the flow separates from the hull. When this happens, it results in a sudden and much more significant loss of pressure. Losing pressure in the stern region causes a large increase in hull resistance because this pressure associated with the flow “closing” behind the hull was helping push the boat along and partly cancelled the pressure resistance from the bow wave. Most of the pressure resistance is now located forward and it makes the hull directionally unstable because the driving force ends up far behind the hydrodynamic resistance force.
This is why some hulls become unmanageable above a given speed.
Kind regards,
Eric
Thanks for those clarifications, Eric. I realized that you’re describing essentially the same behavior as air around a sail.
This makes perfect sense.
Thanks again,
Geoff
Hello sir, first I am very thankful to you for encouraging and guiding me.I am a hobbyist of electronics.
I have developed my own firmware with arduino and calculate transformer turns for my own design. I use IRL540 as you suggested. it works fine. But I am very curious about that, this MOSFET is a avalanche rated 100V. then how to handle the back EMF from the transformer with out using snubber circuit.
Dear Subrat,
It is a very good observation! Look up “unclamped inductive switching” and “active clamping” and you should find plenty of information about these issues. The energy needs to go somewhere during the dead-time of the push-pull stage drive, otherwise it puts a lot of stress on the MOSFET.
All the best,
Eric
Work hardening happens due to dislocations in the crystal structure of the alloy. Basically what that means is that some type of plastic deformation occurs which realigns crystal structure along a linear plane. Work hardening is the effect of various dislocations interacting with each other. It is easy for crystal shapes to deform when there are few dislocations, much harder when there are many.
The basic principle that I’m trying to convey though is that work hardening can only happen via plastic deformation. Elastic deformations, which is where materials flex but do not permanently bend or change shape, will not cause crystal dislocations. On a microscopic level there may be some work hardening that takes place near the limits of elastic deformation, but not from ordinary vibration effects. The forces at play must be at least in the proximate realm of causing plastic deformation in order for a worry to be rational. If you’re not worried about it denting or bending, you shouldn’t be worried about work hardening.
Daniel,
Thank you, it is a very good and interesting contribution. There is scope for improving the text of article, so I will now do that.
Kind regards,
Eric
Hi Eric,
Interesting article, thanks!
I have a 2006
Volvo Penta D2-55-C
868971
5103955405
It has the simple panel with tach, LCD engine hours (not working) and key on/off, the key also controls the glow plugs. The engine has a black box on the coolant side like the one in the picture. What I would like to do is get the engine data, RPM, temp, oil pressure to my iPad. Do I need to buy a penta MDI interface to do that? I have NMEA 2000 on the boat too.
Hello Mike,
You need a gateway to bridge from the J/1939 protocol used by Volvo Penta to NMEA2K. There are aftermarket devices to do that, like the one made by Yacht Devices (please note that I have never used or seen it however). Have a look and see what you can find.
Best regards,
Eric
Thanks, I’ll have a look at those.
My understanding is that the MDI module also controls the alternator output – no battery charge if bypassed. Is there a fix for this.
Hello Murray,
It is incorrect. The alternator is a standard alternator and it charges independently of the MDI module. The only thing the MDI module does is kick-start it about 1 second after the engine fires up. It does this by applying power to the D+ terminal of the alternator (where the charging light is traditionally connected).
An alternator that has been in service for a while normally has some residual magnetism in the rotor and will often self-excite and start charging by itself if you rev it up high enough.
However, a simple work-around for this is briefly applying battery voltage to the D+ terminal of the alternator and it will cause the alternator to excite and start charging. The D+ terminal is a small threaded stud with one black wire attached to it and there is a “D” embossed in the backshell casting near it.
You have raised an interesting point, so I will have a look back at the text of the article and see if the matter should be mentioned there.
Thanks and kind regards,
Eric
Great post, thanks!
My D2-40 (from 2019 with 300 hours) blackbox failed yesterday after an dieselfilter/oilchange where I had to use many long attempts to get the engine running afterwards. Suddenly the panel went all black. I bypassed with an external startbutton and got it running. But my batteries would not charge what so ever, even after high rpms (2500).
So in my case the blackbox seemes to have to be working to start charging. What can be done to start the charging having bypassed the black box?
Regards Erik
Hello Erik,
You need to purge the fuel system from air bubbles after a filter change using the manual priming pump located on top of the secondary fuel filter before restarting, otherwise air will get to the injection pump and you might have to purge the injector lines.
Your case is interesting as you clearly killed your MDI box with the electrical transients generated by switching the solenoid/starter motor. Can you please post or e-mail me the Volvo Penta part number printed on it?
Anyway, the MDI box energises the D+ terminal on the alternator about 1 second after starting the engine to cause it to start charging. It is the small threaded stud with a single black wire attached to it. Just touch it with a wire at battery voltage and it will start charging immediately. If you are going to do away with the MDI box, then install a charging light (2W incandescent bulb typically, or a power resistor) between the engine “ignition” circuit and this terminal. The light will glow before the engine starts and go out as the alternator starts producing a voltage.
Kind regards,
Eric
Thanks for replying!
Today I got a new MDI box and installed it. After many attemps I got light to the LED display, and engine started. After a minute the battery symbol and alarm came on. I stopped and started and alarm came on again. The alternator was charging so its clearly a false alarm for some reason. Then I reved the engine to 1500 rpms and the temp and rpm gauges died, came back on and froze, and the display died. And that was it. No more life. Had to kill engine manually. Do you have any idea whats wrong? Some kind of electrical failure/overload/grounding fault into the MDI?
I’ll mail you the number for both MDI
Hello Erik,
I am quite concerned by your observations. The display should come on as you power up the EVC system and, if it doesn’t, it suggests a power supply issue like a bad electrical connection and the prime candidate is the cabling between the battery and the engine, or plugs not fully inserted into the MDI module.
Also note that the MDI module has two identical sockets labelled “Panel” and “Multilink”, which are physically interchangeable, but incompatible. I remember reading a report that swapping these plugs by mistake damaged the module.
I would find it very difficult to believe that Volvo shipped a new MDI module that would not readily power up and initialise the display properly.
When the alternator starts charging, the stator windings feed an AC voltage to the rectifiers connected to B+ and B-. A small secondary rectifier “duplicates” B+ on the D+ terminal to create a supply point that is only on when the alternator is charging (unlike B+ which is normally at battery voltage all the time). D+ is used to power the internal regulator and this means that the alternator remains dead until external power has been applied to D+ and then it produces its own.
The MDI box applies power to D+ after the engine starts, and then checks periodically that there is voltage on D+ to confirm that the alternator is running. You get a charging alarm if D+ has low voltage, but also if the system voltage exceeds a threshold (around 15V from memory).
The system died when you increased the alternator RPMs and this can only mean high voltage. There are two possible scenarios: either you damaged the alternator regulator when you were cranking and trying to restart the engine after the filter change, or you are sensing the charge voltage at the battery with the alternator and there is a bad connection in the positive between the engine and the battery. Electrical damage from transients from cranking should not be able to happen if the battery cabling is heavy and the connections are good, so I suspect something is not right there. This would also explain issues with powering up the EVC system and the MDI box failed as a consequence of something else, not in itself.
It was a mistake to start the engine when things were not powering up and behaving properly in the first place, because if there are such issues, starting the engine is not going to help. If you are lucky, the MDI module will have protected the EVC gauges.
This would not be the first time I hear about repeated failures of the MDI box because of a bad battery connection. In one instance, the battery disconnect switch was eventually found to be faulty.
Kind regards,
Eric
Hi Eric,
Got your system installed about a year ago, and was very excited when I hauled out couple of weeks ago. Your system really works well, also here in Nordic waters. A lot less barnacles than previous years, using the same antifouling paint. Super happy!
Best regards,
Sturla
Norway
Hello Sturla,
Thank you for the feedback, it is great to know!
Kind regards,
Eric
Eric,
Congratulations !!! Found your page a couple of days ago and can´t get away from it. I was looking for some info on boat design and I can´t remember any more what was it !!! All what you write is so interesting and makes a lot of sense to me.
I’ve had my little share of sailing and one tactic it did work for me in heavy weather was to throw some lines tied to fenders, or what ever I could find, about 30 or so meters behind and they did little to slow me down but they stir the water and created the effect of flattening the sea on my wake. Somehow they broke on my port and starboard but not exactly at my boat.
What do you think about heaving to ?
Best regards,
Chacho Andrade
Hello Hector,
Thank you for writing all the way from Chile! I have great memories of the time I spent in the Channels and then around Chiloé and Puerto Montt.
I never tried to tow anything in following seas and waves never really broke over the stern, the boat always accelerated and stayed largely clear of the crest. My thoughts are that anything towed behind the boat could only have an effect over a very narrow strip of the surface, because it is not practical to tow something wide and keep it in place. I think a serious wave coming from the stern would just pick up the fenders and throw them forward.
My old boat, the Yarra, was not the right boat for running before a storm of oceanic scale with waves travelling at 30-40 knots and I generally tried to avoid getting into this situation. I sailed upwind in these kinds of conditions because it was a good boat for doing this. I ran before the sea offshore a number of times, sometimes in winds of 40-45 knots that lasted around 36 hours, but this is what I would call a standard gale, nothing special. If instead it blows like this for a week or more and from different sectors, the result is unimaginable and few people have experienced it.
I think that heaving to in a breaking sea is one of the most dangerous thing one can do, same with lying ahull. It is the best way to get rolled over and possibly also dismasted. These days, with a lot of older people cruising who are no longer as fit and strong, this kind of thing usually results in injuries as they get thrown across the boat when it gets hit by a wave and a lot of the time the weather isn’t even particularly bad, just a bit of a gale and 4-6m deep wave troughs.
Kind regards,
Eric
Hello Eric. Thank you for all your research and commentary. I own a couple D1-30F engines on a catamaran sailboat. I was part of the engine recall program. Since February 2018, I have replaced 5 MDI boxes between the two engines. The first failure didn’t make 2 minutes. Outside of the obvious concerns I’m wondering why VP engineering has not resolved the matter. Beyond them? Your article mentioned vibration and temp issues. My original engines since 2009 had accumulated 880 hours and ran flawlessly with no MDI issues. I think whatever they did electrically
to bring the new engines into compliance has generated the issue. I’m not an electronic engineer but I believe there’s a sequencing issue that they can’t overcome without a broader look at components in the system all the way to ground. They’ve tried to put a bandaid on this issue since day one. Nobody’s screaming at this moment because they’ve been very generous with replacement parts. But that doesn’t speak to the known defect and safety issue of engine shutdown on waterways or oceans.
I did read a commentary from someone that indicated that a technician told him that they are stressed over 13.8 volts so essentially any craft with mppt charging might be suspect as to cause of failure. Of course, as the writer indicated, it would be difficult for VP to get around their generator output of 14.2-14.3 volts. So essentially, mppt charging systems with equalizing voltages would void your warranty if that were true. Hmmmmmm…. now there’s a new twist for VP owners and long term boating. Maybe we all ought’a get ourselves some buck converters and jump in.
So thanks again Eric and if you come up with an engineered fix, please share.
KJ
Hello KJ,
There is no doubt that a number of the failures experienced by people, and especially the short-term ones, have had an electrical root cause, rather than premature ageing due to heat and vibrations. My point here is that an electrically sound unit will have a reduced life expectancy if it is left installed on the engine block itself.
I don’t believe for a second the tale about the 13.8V voltage limit. Not only it makes no sense, but it is idiotic when you consider it from a component rating and electronic design point of view. I know that the back EMF from the fuel cut-off solenoid when the engine is stopped has been blamed to cause failures at sme point and this would have been corrected (by adding a free-wheeling diode obviously). Other failures have been related to “unexpected” installation practices using contactors to disconnect the engine ground when it stops etc. This can cause a negative voltage spike in the engine electrical system. Failures of the mechanical relays were also occasionally reported, but this seemed uncommon and it is trivial to fix. Any disconnection of the battery while the engine is running would almost certainly take out the MDI box before even damaging the alternator and this may have happened in some cases with bad battery switches.
I have been considering adding a free-wheeling diode to the fuel stop solenoid because it can’t do any harm, but it is generally difficult to propose any improvements to the electronics, because there are so many versions of them and the differences between them are obscure. I wish I had an opportunity to open and inspect the latest model, assuming they haven’t potted the PCBs in resin by now.
Some revisions of the MDI black box proved to be worse than the versions they were supposed to replace and led to yet another hardware revision. I am also puzzled by the fact that Volvo Penta have been struggling with this issue for that long considering that we had reliable engine control modules (ECM) before these D-Series engines were even brought to the market, but these are not constructed like the MDI black box.
Remember also that the MDI box has zero control over the operation of the engine itself once it is running. On these engines, emissions control and regulatory compliance are entirely met by the mechanical injection system and thermostat. The only driver behind the many revisions of the module has been reliability.
Kind regards,
Eric
Hello,
Thank for posting a very interesting article. I have one of the latest versions of the MDI, replaced as a part of the recall campaign in the autumn 2018 at the time I bought the D2-40F. This engine has been working flawlessly for 65h, but now the preheating fails. I have not yet opened the MDI but will do so, and if necessary replace the relay (or add an external relay activated by a manual push-button and / or timer circuit). As far as I can see there are no potting in my MDI. Regarding heat as a root cause of the failures, I added a fan to the engine compartment last year since the generator seemed to become too hot (+90C?) during warm summer days after about an hour of running the engine, the MDI certainly got even warmer.
Jens in Sweden
Hello Jens,
Thank you for commenting on the build of recent MDI modules. The preheat circuit is extremely simple. If the relay failed after such a short time, it could be vibration-related as it is a mechanical component with a spring-loaded contact and plain bad luck. If they still use the same relay (Song Chuan 822E-1A, 12V coil), then it is available from Mouser Electronics for a few dollars under part number 893-822E-1AS12VDC. Please do send photos of the inside of the new module and the PCBs when you get in there.
The MDI module is mounted alongside the cylinders below the water-cooled exhaust manifold, which is one of the hottest parts of the engine block and a lot of the heat flows into it by conduction. The new D-Series engines also run hotter than the older models in order to achieve cleaner combustion.
Kind regards,
Eric
Hello Eric,
The design has indeed been revised: now the use solid-state relays / FET:s only, I will email a photo. I cannot find any bad solder points or obvious signs of damage or ageing. Possibly I will check if the preheat FET receives a gate voltage or not, and in that case I might replace the FET.
Jens
I have one of these in my boat. Part number 21558929. It has worled flawlessy for several years. One spring, after been on the hard for a whole season, the fuel was contaminated with water. That resulted in water in the fuel/injection system, causing sudden stop of the engine after just a minute. Didn’t know at that point it was water, not just air in the fuel lines. Probably the diesel in the fuel lines was ok, but when the engine sucked in the contaminated diesel it stopped. Then we suspected that water was the culprit. Emptying all the fuel, cleaned the fuel container/tank, fuel filter and refueled with fresh diesel. Bleed the fuel system, but still no start. It was probably still water in the fuel lines. Managed to get the water out of the system eventually. But in the process we accidently shorted the glow plug rail to ground. That caused a spark and the preheat / glow to not function anymore. The rest, instruments and starting was normal.
When inspecting the MDI box I encountered that one of the MOSfets didn’t measured the same as the three other. Ordered one new MOSfet (011N04L) and swapped it. It was difficult to desolder with just a soldering iron. In the process the soldering iron slipped and I ripped one SMD capacitor out of the circuit board. It seemed to have survived, as there was no destroyed traces and the capacitor also seemed ok. So I resoldered it.
But my soldering skills isn’t as good as I wished it was. At close inspection I saw a solder ball betwen the legs of the MOSfet, but as it was at the earth plane, and five of six legs where connected to gether anyway, I didn’t try to resolder. I probably should…
When connecting the box and all the wiring, we tried to start. That didn’t went well. The system alarmed instantly. And the glow plug rail showed 13 volt. Wich it shouldn’t have, as we haven’t pushed the preheat button yet. In just seconds I smelled burnt electronics (never good) and when I touched the MOSfet it was very hot. I measured it again, and now it was shorted.
I ordered two new MOSfets from Digi-key (fast shipping, just two days from US to Norway). I resoldered the new one, and now it measured the same as the three other.
Connected all together, but this time without connecting the preheat lead (the orange one). Turned on the main circuit, no smells. Turned on the display, and all seemed just fine. Still no smell. Shut it down after a few seconds without trying to neiother preheat or start. Pulled out the MDI box and touched the MOSfet. Not warm at all. Still measured as normal. So I put it all together one more time. All seemed ok still. But when I hit the start button (just to check if the starter solenoid kicked in) it just klicked. Not the solenoid, but something electronic, like a fuse or something. I smelled the MDI box yet again, but neither strange smell or hot components. Nothing visually abnormal either. Checked all the fuses I could find, all of them seemed ok. Tried one more time to put it together, but the display was dead. No life at all.
So what do I do now? Omit the MDI box and rely on old time simple relays, or buy a new MDI?
Hello Geir Andre,
Shorting the glow plug rail to the block will cause damage because this supply is not fused anywhere. The IPB011N04L MOSFETs are arranged in pairs in a somewhat surprising back-to-back series configuration, which means that they can also interrupt any current trying to flow back into the battery. A single MOSFET behaves like a forward-biased (i.e. conducting) diode in the presence of a current flowing backwards through it.
It could appear overly cautious, but Volvo Penta must have found a reason to adopt this design. Anyway, in the event of a short-circuit, the FETs have no other option than blowing like fuses and one in the pair will almost invariably fail before the other. The most immediate failure mode for MOSFETs is going into short-circuit first, so you could end up with one survivor and one open-circuit, or one shorted and one open-circuit. If you replaced the FET interrupting reverse current and the other one was shorted, then connecting the glow plugs would cause uncontrolled current to flow freely through the shorted FET and then backwards through the body diode of the new FET, dropping about 0.6V on the process. This will cause it to dissipate about 6W in heat per glow plug connected (about 10A current per plug on these engines and 0.6V drop over the transistor). This will cook it in very short order. In this case, you should have replaced the pair and everything should have come right.
MOSFETs can be difficult to test without first removing them from the circuit. A good transistor will read open circuit from the drain (tab) to the source (5 pins linked together) and like a diode from the source to the drain. The gate (leftmost pin) should be isolated from both the source and the drain.
The best way to remove SMD components is using a hot air soldering station. With a little bit of care, you can achieve the same with a heat gun on a low setting. You want to heat the parts and the board just enough to melt the solder and release the component. You can use aluminium foil to shield other parts of the board.
Reading about your last attempt, I wonder whether you successfully removed the short from the glow plug rail. Semiconductors can indeed emit a faint “ping” noise when switching a lot of current and the only part of the circuit capable of this is really around the 4 MOSFETs. I would use a heat gun and lift off at least the two MOSFETs switching the preheat (if not all four), then try the unit without them and the starter solenoid and glow plugs disconnected anyway. See if you can get the display back. If not, then further damage has occurred and you might have to consider one of the options discussed in the article above. You can manually switch the preheat and starter solenoid to get the engine running, but it wouldn’t be responsible to operate the engine without any monitoring on oil pressure and water temperature, so you should at least add these two gauges and an alternator charging light if you don’t replace the MDI box.
Kind regards,
Eric
Thanks for the great answer. 🙂
I found the reason why the display didn’t wake up. When we installed the battery, we forgot to tighten the terminals 🙁 When we tightened the terminals, the EVC display worked again. But the EVC beeps constantly. If I remember correctly, it is the system failure symbol.
Regarding the MOSFets, I ordered two new ones but did replace just one. So if I replace both the new ones, it might work? I’ll try it tomorrow. Crossing fingers and toes 🙂
Thanks 🙂
It would appear that the clicking noise you heard earlier could have been a spark at the loose battery terminal when the starter circuit was closed and that would be good news.
If you have a failed MOSFET in the pair, the system might well see it and report a system failure. You should not find battery voltage on the 5 pins linked together (source terminals) of the FETs when the battery supply is present and the FETs are supposed to be off. If you find battery voltage there, then the first FET must be shorted.
If you heat the board, you can just as well remove both transistors for a start and test them properly away from the circuit. You could also try to power up the module without them and see what the display looks like. You might only get an alarm when you try to preheat because it can’t switch the output on.
Best regards,
Eric
Regarding: “One could opt to install an independent parallel engine start circuit by adding two external relays to connect the “PREHEAT” and “START” terminals to the “BATT” terminal at the push of a button. In this case, the preheating relay must be able to handle a current of about 10A per glow plug, so 40A on a 4-cylinder engine.”
Are the preheating and start outputs of the MDI box just simple relays? I attempted to look up the part numbers “HAC728” without success to confirm. If so, there should be no harm or risk from applying power to those terminals (with harnesses still connected) using external backup relays, correct?
Hello Ken,
Early versions of the module used relays. Later they replaced these with MOSFET transistors in a configuration that fully isolates the terminal posts. In both cases, you can install a parallel control circuit without issues.
Can you please e-mail me a picture of the top board in your unit and the MDI box model number? I am curious about the HAC728 reference you are mentioning. It doesn’t match either design and I would like to confirm there was not an intermediate circuit with different components maybe.
Thanks and best regards,
Eric
Hello Eric,
I hope this email finds you well.
Thank-you for the details (your insight) within the website. Forgive me to ask if not already posted, the design/plans for Nordkyn 1) Would it be available for purchase? 2) Having sailed Nordkyn for some time would you modify the final construction plans or note improvements, rigging, sails, interior, deck and hull?
All the best and stay safe.
Hello Andrew,
Yes, I would make plans available with a modest lead-time (see also the answer to the question just above). Designs are made to be built and this is an awesome yacht to sail.
The interior of a boat is always something that can be altered up to a point to suit the future owner. One day I might extend the length of the small locker and shelf separating the companionway from the galley by 400-500mm maybe to offer better bracing when facing the stove. Other than that, I wouldn’t alter anything to the design after having sailed it for almost 10 years now.
From a construction point of view, I would anodise the chainplates before welding them in, it would make them less reactive to the nearby stainless steel of the rigging.
Kind regards,
Eric
Eric,
My MDI box failures have all involved the start-stop functionality: un-commanded stops, inability to stop, or inability to start. At all times, the J/1939 bus has continued to function (I have a J/1939 to N2k interface.)
How hard can it be for Volvo-Penta to take a button press on the panel and operate a relay in the MDI box to activate the stop solenoid or start solenoid, as appropriate? I realize it’s slightly more complicated because there’s some self-test circuitry involved too: for example, disconnecting the stop solenoid raises a periodic alarm.
I’ll take a photo for you of a failed 23195776 (shipped, incidentally in a box marked 23231607.) I’ll also do a few tests on it just to rule out the possibility that after all these failures the buttons on my panel haven’t worn out.
Jeremy,
Thank you for writing. Remember that the control functions of the MDI box are precisely limited to starting and stopping. It could have transient issues over CANbus like skipped or corrupt messages and they wouldn’t be visible. There have been many “dead” failures with these modules in the past as they seemed to suffer from electrical transients. Your feedback is interesting as it suggests that this would have been addressed by now. At least one relatively recent version was recalled as faulty and known to malfunction with the symptoms you describe.
I think that the module operates in relatively difficult conditions from an electrical point of view as it is exposed to the high frequency ripple voltage from the alternator (which, by default, feeds into the starter motor connection, not the battery) and spikes from various inductive loads. There is also a fair amount of attached wiring to pick up transients and feed them into the electronics. While the design and construction of the module have improved a little over the years, they are clearly not “heavy duty industrial” when it comes to the interface between the electronics and the outside world.
We also tend to focus on the physical module itself and the electronics, but some versions could just as well have experienced firmware problems as such embedded code is always very closely tied to the electronics.
When you open your 23195776 module, see if you can separate the PCBs if you get the opportunity and also take a picture of the lower one with the processor. At some stage, once I have a little more material available, I will write an article showing and discussing the differences between the models I have received photos for. The design has seen considerable changes over the years.
Thanks and kind regards,
Eric
Really appreciate your article re MDI for the D1/D2 Volvo Penta labeled diesels.
I have at least 1 more number 3885724. My engines are D1-30B circa 2006/2007. Not sure which but they apparently missed the engine recall either by date or the fact that they were on a European boat which I now own in the US.
Another puzzle piece. VP sends 23231607 labeled blue parts box with 23195776 labeled part inside. Their explanation per the local VP Certified business… 23231607 is a kit containing 23195776 and a pamphlet of instructions… $800 please (well, they haven’t said please).
Hello Martyn,
Thank you for the additional information, I have added it into the table. As I have never seen a picture of a MDI module labelled 23231607 and everybody reports receiving 23195776 in the box labelled 23231607, it could well be the explanation indeed.
This would make 23195776 the latest version and, as it has been around for a couple of years now, it may have proven more reliable. Still, I have received photos of the top PCB of 23195776 in failed units, so it may not be the end of this saga.
Kind regards,
Eric
Hi Eric
Would you give me your thoughts on hull windows? Would you ever consider small windows amidships so that one could look outside while sitting at the settee?
Just want to say I very much enjoy your site and the practical and clear information you present. Nordkyn is a very handsome yacht and your thoughts and criteria mirror my own.
regards, Olav
Hello Olav,
In the case of Nordkyn, it wouldn’t make much sense because the roof windows are at standing height and they provide plenty of light and visibility outside from the cabin. Hull windows would take the space of some very useful lockers and shelves underneath the side decks. However, some designs are heavy and deep in the water and the roof is so high up above the cabin floor that you cannot see outside at all. While hull windows would certainly help with bringing light down inside a deep dark boat, when it comes to seeing outside… short of putting one’s nose against the window, they will achieve absolutely nothing. Half of the time they will be either up towards the sky, or down by the waves and too small anyway.
In terms of construction, there is no reason why you couldn’t build a small hull window that is as strong as the hull itself. The key element is that it must be mechanically held in place so it is physically impossible for it to fall off, even 15 years after having been installed when the sealant is failing etc. This is very different from hull windows seen on production boats. Last year, such a boat was lost in heavy weather off Cape Brett here in NZ after getting rolled and popping (not breaking) many windows…
The window pane should also be strong enough to be unbreakable and thick enough so it cannot possibly flex and pop out. Thick tempered glass would probably give the best results.
Kind regards,
Eric
Hi Eric
Thanks for your quick reply. I love the simplicity and construction of the interior. What thickness and density of divinycel did you use? And what cloth weight (and number of layers) did you use to make the composite panel? Would you have done anything different?
regards, Olav
Hello Olav,
I mainly used 20mm Divinycell in 60kg/m^3 for the parts of the accomodation supporting loads, partly because it was a grade so readily available. The upper lockers were built with 12mm foam in 40kg/m^3. The laminate was generally 1 or 2 layers of 450GSM E-glass, depending on the side of the panel, location and level of impact resistance sought. The transverse bulkheads are much stronger than that and so are the companionway steps.
I used polyester resin, much lower cost than epoxy and much faster, and a polyester filler made starting with the same resin. I would consider an epoxy-based filler if I was to do it again, as it leads to a better substrate for painting and no difficulties with curing in low temperatures. Spray painting inside was a fairly evil job, but the finish is incomparable considering all the corners and adjacent surfaces. That’s about it.
Kind regards,
Eric
I have a 2010 D2-55F with about 3500 hours and experienced the issues you refer to here.
Problems started in 2016 with a burnt out fuel solenoid. Was replaced and the replacement burnt out. It was then noticed that the Stop on the LCD was flicking on and off. The MDI was replaced. Within a few weeks we had surge problems caused by the stop solenoid being activated. Also problems with starting. Replaced the MDI again. Also failed, the Volvo dealer gave me their older test unit which I used for a month or so. They got a new revision which has been on for a couple of years without problem. So I probably have the 22594274.
I noticed there is a 2018 recall notice issued by Volvo for the MDIs. See https://i.imgur.com/YZmExSn.png. Will check with the dealership to see whether I should be upgrading. What I would really like is to have a spare given the horrible reliability.
Greg,
I am aware of the recall. It is quite specific and targets the latest F variant of the engines only, so they were replacing a defective version or even production batch within a version of the MDI module. This can happen. There have been a lot of problems with some versions of the MDI box, but others have also given good service, all have been known to fail and we automatically hear more about the failed ones…
Eric
I decided to check the panel on my Volvo D2 and found that the Stop button was not working. The MDI box that I thought had failed (23195776) is in fact working fine. I’d recommend checking the panel buttons in cases of stop/start problems even though the MDI box is the prime suspect.
Hi Eric,
As written in your article: Some modules were also lost due to the addition of ground disconnect relays to the installation on alloy boats because of the unclamped back EMF of the relay coil.
Now I an owner af an aluminium vessel with an D2-55F with ground connected to engine (2015). Without the MDI its much easier to install a additional ground isolation relay. With my engine and with the MDI I’m struggling how to do this. Please can you advise, how can I isolate the ground/ install an additional relays to minimize contact time with ground/engine (only starting/ glowing).
Regards, mike
Mike,
For a start, I can tell you what I did about it. I electrically insulated the engine block from the hull by mounting it on thick plastic plates and sleeving the engine mounts bolts. I also replaced the metal Morse cable fork on the gearbox control lever to prevent it from grounding the block at the engine controls. The throttle lever attachment already had insulation. If you don’t do that, you immediately set up a cast iron/aluminium battery cell with sea water as electrolyte, whether the ground is connected or not. Next, I used a plastic ball valve on the seawater intake, so it is not electrically conductive when shut. I also have a 2-pole battery switch to the engine and I turn this off when the engine is not running: it breaks both ground and positive supply. The only anode I have is on the propeller shaft to protect the propeller. I designed everything for zero corrosion and achieved zero corrosion.
Now, unless Volvo changed the design of the electrical system on newer engines, you can’t operate the MDI box without a grounded block because there is at least one single wire sensor (coolant temperature switch) that relies on a negative block to function, so you can only disconnect the block when the MDI “ignition” power is off.
If you do fit a ground disconnect relay, it is critical that there is a free-wheeling diode in parallel with the coil to short out the negative spike when you turn it off. I would also want to disconnect the alternator B- post from the block and run a new cable to the battery negative instead so you can’t lose that negative with the engine running. It could damage the alternator.
The control for the relay would have to come from the MDI power wire on the Multilink cable (but beware of the load increase), unless the whole MDI system was able to operate without reference to a negative block. If this was the case, then you would want to operate the relay using two “OR”-ing diodes from the preheat and start posts of the MDI box.
As far as I am concerned, a 2-pole battery switch is simpler and better. Disconnecting the engine ground stops grounding the hull through the block, but it doesn’t actually lead to a good outcome anyway if the hull and engine are electrically connected.
Kind regards,
Eric
Hi Eric,
Many thanks for your reply. In the meantime I have been in contact with Volvo Penta France. They do the installation/conversion for Aluminium Ovni boats. I received the electric drawings and part list to modify the engine with additional relais. MDI is not grounded during operation. There is only ground contact during start and preheat. Please drop me an email to share the information. Appreciate your feedback.
Regards, Mike
Hello Mike,
Then it will require an isolated water temperature sensor.
It still doesn’t resolve the galvanic corrosion cell problem if the engine block is electrically connected to the hull, but from Volvo’s point of view, your hull acts as a big aluminium anode protecting their engine, so it won’t worry them.
Kind regards,
Eric
Hi Eric
Fascinating discussion about seakeeping, speed and seaworthiness qualities in a yacht. With a 2600 kg bulb at the end of the keel fin Nordkyn must be a very stiff boat. What is the AVS for nordkyn? Did you design for a STIX number? Would love to hear your thoughts on both AVS and STIX.
regards, Olav
Hello Olav,
Yes, the combination of the hull shape and low centre of gravity from having the totality of the ballast in the deep bulb makes for an extremely powerful boat. I just had the opportunity to sail on a Hanse and, while the feel and handling can be comparable, the difference in power was staggering. At small angles of heel, shape stability dominates, so it is basically hull shape and displacement. As heeling increases, the role of the keel bulb becomes more and more noticeable and this is what eventually influences the AVS, with deck and cabin shape.
AVS is about 132 degrees, but – more importantly – the rollover energy is over 9 times higher than what is required to recover afterwards. STIX is 56 and it just came out at this value naturally.
Kind regards,
Eric
Eric,
Thank you for the informative article on the Volvo MDI. Wiring information is incredibly difficult to find.
I have a D2-55F with OEM 115A alternator. Now upgrading to an alternator with external regulator. I’m getting an alarm at the EVC panel that I suspect is from incorrect interconnection between the new alternator/regulator the MDI. I’ve disconnected the yellow S wire as I can’t find its purpose for the new regulator. Would this generate the alarm?
Would you know the purpose of each wire between the MDI and the OEM alternator? According to the OEM Alternator schematics, they are labeled D, S, and W. B+ and B- are self-explanatory.
Heins,
You are downgrading your alternator and it is an immensely stupid thing to do. This was the driver for developing the VRC-200 controller, it just makes the excellent existing alternator fully programmable.
“S” is the alternator voltage sensing input and if you run a wire from there directly to the battery positive, charging performance will probably increase enormously. Connect “S” to a VRC-200 controller instead and then you can configure any charge profile you want.
“D” powers the internal regulator. The MDI box applies power to it initially through a small black wire to kickstart the alternator after cranking and then it is monitored for voltage. If that wire doesn’t have power when the engine is running and the battery voltage is below a threshold, the EVC is going to alarm on alternator failure.
Bare alternators sold without regulator have no D terminal. If you connect the black wire somewhere else (like B+) to try to get rid of the alarm, you will need to check that this doesn’t drain the battery when the engine is off and the MDI box could then complain that D has power before the engine starts, when it shouldn’t.
“W” is an AC output to drive a tachometer, you don’t need to worry about it.
Kind regards,
Eric
Eric,
Thank you for the fantastic work you do.
I have an odd start problem with my D2-40B, serial 5102001879. After 11 years w/o problems it began this summer to fail to start when finishing sailing w sails. When pressing the start button the power simply cuts. A few time it starts after power up the power button on the panel, but else I have to switch the main engine breaker downstairs of and on. Hereafter it starts w/o problem.
When it fails to start there is no power from MDI to the starter relay (I put a lamp on). Other panel functions like engine stop, engine alarms, power up etc also works fine. (The neutral switch is apparently not active, I can start in gear, but has always been so).
The MDI Volvo part number is 3885724, i.e. one of the old ones.
I can’t figure out what it mean that I have to cut the engine main to reset the system. My best guess is something to do with the MDI box. Have you any suggestions?
Best regards
Henrik Holten Møller
Henrik,
Thank you for your message. My guess, considering the age of your MDI box, would be that the electrolytic capacitors on the top PCB have dried out. They are no longer able to act as a buffer during the transients caused by the chain of events leading to engaging the starter solenoid and it causes the CPU to crash/lock up at times. When this happens, you have to turn the power off completely to reset it.
Your MDI box is the next version after mine. It should not be very different inside than the one I show on the photos in the article, with two 220uF/63V electrolytic capacitors. I would open the MDI box, separate the top PCB and replace the capacitors with new ones. It is an easy thing to do with just a soldering iron. Use good quality capacitors with a life rated at 105degC. Please send some photos if you get a chance, this is a model number I have never seen open.
Kind regards,
Eric
Thanks Eric. Interesting, I will start right away.
Rgds Henrik
I had the same problem. I traced it a bad battery cutoff switch. I changed out the switch and no problems now.
Yes, this would certainly do as well. Excessive voltage drop during cranking.
Hi Eric,
How do I separate the 12 pin connection between the boards in the capacitor end? Pull apart or de-solder? They seem very tight and I’m afraid to damage connection and boards.
Rgds Henrik
Enjoyed reading your analysis. I have the D2-55F that installed in a Slocum 43 (circa 2016). From the start I had issue with EVI guages as the voltage meter was constantly out… although the NMEA 2000 read out on the Garmin MFD read correctly. ….The dealers solution was to replace the MDI ! .. clearly that didn’t fix the issue. VP has been unwilling or unable to provide a correctly scaled Voltage meter. The following year the replaced MDI simply failed to light up (and the engine wouldn’t start) Replacing that one did fix the problem until June this year… and another one was sent fixing the problem … until last week, after 6 weeks of not being on the boat (hip replaced) . I engaged the connection switch and the engines hours immediately showed and when I hit the ON button (not the START button) the engine started immediately! I let the engine run until the engine reached engine temperature…. and I hit the STOP button until the engine stopped…I removed my finger and the engine started again “on it’s own”….. This was bazzar. So I then held the the STOP for a full 30 seconds… It remained off. The engine’s hour meter remains “on”. The ON /OFF button has no affect on the hour meter and the engine will not start! I would disconnect the battery but I had the same problem two weeks ago. I literally have no faith in the Volvo Penta System… but until I source all the conventional gauges and parts necessary to replace it outright …. I have to work around this… it is clearly an intermittent problem… This will be a fourth MDI …. any input would be greatly appreciated!
Thomas,
I would look at the small control panel with the On/Off, Start and Stop buttons. Any dampness in there could cause control issues. You could remove it and try drying it for a start.
Next, I would ensure that the connection and cabling to the battery are very good throughout. Repeated MDI failures usually have an external root cause, i.e. on board. The module itself is not that unreliable, but electronics are sensitive to electrical transients.
All the best,
Eric
The controller is “potted” sealed in the back and there is no feasible entrance from the front. I don’t see how it could wet or how to “dry” it if it is wet. I am burnishing all connections and torqueing the bolts between the battery and the engine and to the remaining 2/0 AWG and smaller cables to the MDI.
I disconnected the battery from the system and tried a restart… now the system when started will start ticking and Volvo Penta comes on the Tachometer and then immediately stops. The engine will not start… the ticking remains for about 15 seconds ….then it’s dead. It will not react again unless the battery is again disconnected…. Then the same sequence until it dies again. This MDI had 41.8 hours on it.
The Volvo Penta D2-55 is actually the successor to the Perkins 4-108… It is a Perkins 4-134 if you will. Perkins secures the CE certification before it is relabeled a Volvo engine. The engine is actually a sturdy beast.
Having thought about it, even if this can be fixed… The safety of my vessel and my family cannot be left to chance that a voltage transient could eliminate auxiliary power at the wrong time. Think sensitivity to lightning. A purely electrical alternative, while not perfect, has been proven to be a far more reliable and seviceable option. I am really left with no other choice. I am currently waiting for the “Volvo Service Tech” to find a “hole” in his schedule to see fit to install the “next” box. He has had the box now since Monday. The system has been down for three weeks.
Thomas,
Yes, it is potted around the back, but not sealed quite as well around the buttons (membrane keyboard) and any moisture in there could make some of the buttons read as if they were depressed. I would just warm it up to 50degC for a few hours in an oven and see if it helps. Alternatively, try with another control panel if you can.
The behaviour you describe is a bit disturbing. I would check what the voltage is doing on the supply to the MDI module for a start, especially while cranking. How low does it get?
There are simple ways to bypass the module to operate the engine (see in the article above) and you could try that and see if the MDI/EVC system behaves after the engine has started (reboot the MDI by pulling the main power plug after the engine has started if needed). If mine was acting up like that and I couldn’t get to the bottom of it, I would retrofit the engine with analog gauges and senders for all the reasons you describe.
Best regards,
Eric
Thank You Eric,
Thank you for your advice. Your suggestion about the “potted” control panel was one I had considered from the beginning. I am beginning to think that the MDI is not defective. FYI the module is a 23195766
I have started the engine using a jump start across the start solenoid. The instruments “wake up” and operate per normal and Nemea Gateway allows the the MFD to represent Tach, Voltage, and Temp gauges operate per normal. However the Stop button may or may not work (intermittant) and the engine hours remain until I cut the battery switch connection.
After tightening all the connections…At the battery and the MDI the battery shows 12.8 volts max and drops to minimum of 10.8 or 11 volts at the battery at start… and min of 9.7 at the engine buss, and 9.4 volts at the MDI batt pin. There is about 12 ft of 2/0 AWG cable between battery and engine.
Hi I just finished top balancing my Sinopoly 100ah cells to 3.6v using method 1. After finishing I have one cell at 3.542 and the rest at 3.593 with a couple at 3.597 is this something I should be concerned about.
Thank you
Frank
Frank,
I would go back and push them to 3.65V. There should look more even than that immediately after having been balanced.
Kind regards,
Eric
Hi Eric,
Really interesting study you have done here, and by far the most comprehensive and objective on the subject. I am the build engineer for a large sailing yacht. We are looking at ultrasonic protection to minimize growth specifically around our rudder seals. I am thinking of mounting transducers to both the hull plates and to the rudder stock itself.
In your opinion, would having transducers mounted to two areas with differing natural frequencies cause problem with wave amplification/cancellation.
Thank you
Chris Clamp
Hello Chris,
Thank you for your comment. The propagation velocity of the ultrasound wave depends on the material, but it tends to be very high and so the wave length is short, say 50 to 150mm. As long as the transducers are at least a few wavelengths away from each other, constructive and destructive interference patterns are created with the peak amplitudes shifting with frequency (provided the driver operates that way).
The hull structure doesn’t automatically vibrate at its natural frequency, which will be much lower then the system frequencies in almost all situations.
Kind regards,
Eric
Hi Eric,
Thanks for the making all of this information available to those of us wanting to learn about LiFePO4 batteries for boats!
You make a very good case for using cell sizes in the 100-200 Ah range. I see that this was originally published in 2015. I have seen a lot of others that have used the EVE 3.2V 280 Ah aluminum cased prismatic cells in boats and other mobile applications. Do you think that with the advances in this technology over the last five years that perhaps these 280 Ah cells are as acceptable as the 200 Ah cells referenced back in 2015?
Any thoughts on this would be greatly appreciated. Thank you!
Charles
Charles,
This is always a question for the cell manufacturer, not a matter of opinion. I would want to know more about the type of alloy used in aluminium-cased prismatic cells before using them on a boat. They are anodised, but some grades of aluminium (especially the stronger ones) contain copper and literally dissolve if they come into contact with seawater. The plastic casings are completely inert in comparison…
Kind regards,
Eric
Hi Eric
Congratulations on an eminently clear explanation of ultrasonic antifouling. I have a Carter 30 yacht at Lake Macquarie (salt coastal lake) New South Wales, on a swinging mooring. I had some problems with keel bolt leakage related to lifting and propping in the boat yard, so sought a means to lift out less often. I made up and installed the Jaycar kit in 2016 and have had pleasing results. I don’t get barnacles and algae seems to be killed (brown colour) Some sponge attachment occurs. I get a diver to clean twice a year and have not had the boat out since 2016. Of course the hard antifouling became exhausted in 18 months. It happens that my insurer wants a hull report next year so she will go up.
I’m interested in your code revision. Would a PIC12F675 with your code just plug in to the old Jaycar?
I noticed that you obtained 5.9W for the original, however the Silicon Chip article quote 3W. I can easily provide more solar power to the boat
On a completely different technology, I have a friend with a yacht with Barnacle Rid copper electrode system. What have you learned about those?
Hello Keith,
My hardware has always been a bit different and this will account for some of the difference in output power. It would arguably be possible to put a version of my firmware on a PIC12F675 in PDIP-8 package for the original Jaycar kit, provided some adjustments were made. It would increase the time-averaged output power and change the operation of the device including frequencies, but the peak power would stay the same.
I had never heard about the Barnacle Rid system you mentioned. I remain to be convinced that the principle has anything to do with a “copper ion field” rather than just an electrical pulse or high-frequency current through the water – in other words an electrical field. It could be enough to disturb the settlement of shell larva and the corrosion of the electrodes may just be a side-effect.
It is difficult to assess the technology because they don’t even make their product manuals available online, it is a “buy blind” situation. The statement that it won’t cause corrosion is a clear indication that it uses AC power between the electrodes. It would be really interesting to understand the principle better. The first thing to do would be putting an oscilloscope on the electrode outputs to see what is going on. After that I would be tempted to replace the electrodes with another material (lead, graphite?) that wouldn’t corrode in the water hopefully and see whether the copper actually has any role to play. Copper compounds are eco-toxic and they could have some antifouling effect against algae, but the concentration would be extremely small and it wouldn’t be able to work properly in currents or even on swing moorings most of the time, so the claims made in this direction in fact go against such an explanation. Their “comparison” with ultrasonic systems can only be summed up as a blatant pack of lies throughout and that is a bit concerning. Overall, it looks pretty expensive to basically achieve a comparable outcome only with the same amount of power or more while having to keep replacing the electrodes and deal with wires on deck…
Kind regards,
Eric
Hi Eric
thanks for your response. I wanted to understand the BarnacleRid electronics so I measured my friends system (DVM) and concluded it was a constant current of about 300mA. Examinimg the board I noted a DC-DC isolator assembly.I made up a system myself and used an isolator, a 741 and copper pipe electrodes. When I trialled it on my boat I found one electrode covered in hard white deposit. I realiized BarnacleRid must polarity swap so I added a 555 timer , 1hour polarity swap. It now exibits some black dusty deposit which is easily washed off, that is the same as my friends boat. What I don’t know is if it helps and whether it adds anything to the ultrasonic system.
I think your code change has more potential. Would you sell me a recode PIC and whatever instructions are needed to install?
Regards Keith Webster
Hello Keith,
This is interesting! I would have expected it to switch polarity much more quickly than this, but maybe it really relies on corrosion of the electrodes. In this case, I would be quite concerned about having it around an aluminium hull, because if there were defects in the paint at the bow and stern, the current would take the easier pathway through the hull and it would slowly burn a hole through the plating. The DC/DC isolator is there to separate the circuit between the electrodes from the on-board electrical system, but it makes no difference if the hull becomes the conductor. Did you take a photo of the board?
Yes, you can have a CPU flashed with the new firmware, it should be interesting. I just need to order the chip and deal with it when it arrives. There won’t be anything else to do besides plugging it in.
Kind regards,
Eric
Hi Eric
The timer of 1 hour is just my guess, I didn’t test the board when I had it because I didn’t know polarity reversal was needed.
I don’t think it would matter much even on much longer times. Unfortuneately I don’t have a pic of the board.
Please make me a revised PIC
Thanks Keith
Keith,
As far as the potential for metal corrosion goes, minutes or hours wouldn’t make any difference. It would corrode at one end and then corrode at the other. Interesting to know it is just a DC system. It seems to be putting traces of copper into the water, so much for the clean eco-friendly claim!
I have ordered a PIC12F675 for you. I will be in touch via e-mail.
Kind regards,
Eric
Thank you Eric
Keith
Hi Eric,
can you give me any information about the auxiliary connection?
Can I use it to drive an external relay?
Thank you
Lorenzo
Lorenzo,
It is only an auxiliary input for a sensor and its status is reported over CANBus.
Kind regards,
Eric
Eric…would there be an advantage in using a dual frequency transducer and varying the frequencies to get more interference bands? Also what would you consider as a minimum transducer power?
Thank you.
Hello Chuck,
All transducers have more than one frequency peak, but they are optimised for a resonant frequency. It could be interesting to try using a dual-frequency unit indeed, but overall I am not that convinced that it would make much difference unless the two frequencies happened to be particularly favourable for tackling marine growth. More knowledge is needed about the performance of specific frequencies.
With regard to power, it depends on what you are trying to achieve and what power we are talking about. Peak power is what determines the “reach” of a transducer, because the energy reduces with the inverse of the square of the distance from the transducer; low peak power would quickly lead to a fairly useless system. This being said, keeping barnacles off is really, really easy; it doesn’t take much power. With weed growth, research has shown that time-averaged power is what matters: the more power used and the longer the exposure the better. When I increased the average power for the exact same peak power, I was able to see weed growth beginning to recede. In other words, ultrasonic energy can kill attached algae; not just captive micro-algae in suspension like demonstrated in laboratory experiments, but also proper algae like we find on hulls. The experiment also showed that not all species are equally sensitive to it; many types disappeared completely, but not all of them. A few struggle, but still manage to hang on. One interesting thing was that the two main imported invasive species that are worrying the NZ Department of Conservation (fanworm and undaria) are among the ones that disappeared completely.
Kind regards,
Eric
Hi Eric
Happy New Year
A followup on the idea of me trying a PIC with your code
cheers Keith Webster
It’s wonderful to learn about a cruising boat designed for sailing. So many good ideas. Thank you.
How many headsails do you carry and what is your attitude to roller furling and roller reefing?
Thanks again,
Paul
Hello Paul,
I currently have a working genoa, three jibs and one asymmetric spinnaker. I was initially thinking about another “maximum” lighter genoa, but I couldn’t really justify it.
Roller furling completely destroys sailing performance once you start rolling… my #1 jib has quite a large wind range, so if it is a bit fresh or blustery, I choose it over the genoa and then it can stay until the wind drops down quite a long way. I don’t actually change headsails all that often. Sometimes I sail on the large main alone when there is enough wind or if the distance is short. One day I beat a crew on a Beale 40 who tried to race me upwind in 25 knots when I just had the main up.
Kind regards,
Eric
Thanks Eric,
I’m grappling with the question of furler versus multiple headsails on my boat. It seems just about everyone goes for furlers these days, but the North Sails salesman couldn’t give me a satisfying answer about the performance difference.
Since going for furlers involves spending money its nice to hear a strong argument against. I’ll research ideas about sail-changing foredeck-safety instead:-) (Your thoughts and methods on this would be interesting if you found time to record them.)
What low windspeed do you drop everything to the deck and rest? Would a “maximum” Genoa lower the ‘take a rest’ windspeed much?
Nicely done against the Beale 😉
Paul,
The best way of replacing a headsail on a yacht depends on the boat and whether the wind is rising or dropping. If the foredeck looks unpleasant, you always have the option of getting on a broad-reach, sheeting the headsail in and dropping it behind the main. I used to do that almost systematically on my 30-footer because the freeboard forward was low and the foredeck very wet. Nordkyn is a lot lighter and higher forward, the headsails sheet well over the deck and it is usually quite manageable to drop them without changing course, unless it is a genoa and there is too much wind. Don’t go forward to fight with a sail on a deck that is heeled and awash, it makes no sense unless you are racing.
It usually needs to get fairly glassy before I drop everything, unless the sea state is too much and the sails are getting hammered. With deep bulb keels, you need to be careful sometimes. Sometimes I sheet the main in the middle and carry on with the genoa or an asymmetric. Even in near-zero wind, I usually manage to extract a knot of so of boat speed from somewhere.
Making a set of headsails normally cost you a bit more, but after that jibs tend to last for a very, very long time because it is the genoa that does most of the work and takes most of the sun. It still lasts longer than a furling one
What “just everyone” goes for is lazy and “convenient”. What it means in terms of sailing is very, very far down the list of what matters. When you start rolling a sail, it moves up and gets baggy with a fat leading edge. It makes the boat heel instead of propelling it and it won’t point any more. The stronger the wind, the worse it gets, the more load it places on the furler and the more likely it becomes to break.
Eric
Thanks
I wonder now that electric motors and lithium batteries have progressed so much whether you would if building today fit these instead of the Volvo engine that you did, especially given the low hours that you have used it for.
The new Salona 46E has twin engines which I personally would not like as they can easily catch ropes etc., but the concept is good for in harbor maneuvering.
Hello James,
Marine electric propulsion is a joke, and not a funny one, in most cases. First, you need 42kg of LiFePO4 batteries to hold the equivalent propulsive energy of 1L of diesel fuel, so your range is gone. Next you have the peak power problem. My Volvo can develop 40HP in case of emergency. An electric motor capable of doing the same would be rather substantial and its energy consumption would be impossible to meet within the weight and space envelope available on a sailing yacht.
People play with little motors, lithium batteries and solar panels and push along gently in no wind. Great, but it just means they have nothing if it blows hard and they need to push straight into the wind to get out of a situation, so the improved safety aspect of having an engine is gone.
With Nordkyn, I can literally always sail and make some headway. I can make good speeds even in sub 10-knot winds when most everybody is motoring. I sail in and out of anchorages all the time without even thinking about the engine, but I want it to be there if I suddenly need a lot of thrust for a short period when spray is flying around. There is not always enough time or space to hoist some sail and get out when things turn nasty. You try to avoid getting into these situations, but sooner or later they happen anyway: tight anchorage, bad holding bottom, violent wind change…
Kind regards,
Eric
“If the boat is drifting sideways, the appendages are already stalled”
Should this contingency effect the design of keel bulbs? Do you think it worth designing bulbs to minimise their resistance when being dragged sideways?
Hello Paul,
Yachts should not be going sideways with a stalled keel in the first place, it is a dangerous position to be in if the sea is breaking. We would rather design bulbs that improve lift (i.e. “lateral resistance”) for upwind performance and then it is a matter of sailing the boat properly.
Kind regards,
Eric
Hi Eric, very tough matter, thank for the explanation. I have a question though. Say I measure amps at the LiFePO4 battery and use that to terminate charging @ 0.033C. Say I’m charging with solar so the charging amps depends on the sunlight and it might be only a few amps. How can I distinguish that from 0.033C charge current? As far as I can tell both situations seem the same!
Rob,
You seem to be referring to the case where the solar charging current is below 0.033C. In this case, 100% SOC is effectively reached at a voltage lower than the specified termination voltage for 0.033C, see the example provided in the text. It is not the same and only a good BMS programmed to deliver a smart charge termination can help you there.
Kind regards,
Eric
My brand new D2-50 has failed at 5 hours due to a faulty MDI. The unit will be replaced under warrantee but I am very uncomfortable having a potentially unreliable weak link in my engine system. I do a lot of my sailing in remote places and this is not seaworthy enough for my liking…
I want to install an emergency bypass start / stop switch on the side of the engine box, capable of being used for an extended period, not just as a one-off to get me back to the marina!
I understand how i can introduce a straightforward starter switch:- one for the starter motor, one for the glow plugs. However, I am not sure about the stop solenoid. Does this require power to open, or power to close the solenoid, and which wire do I link into? Do I have to do anything to make the alternator work too?
I would be really grateful for any advice on wiring up a robust emergency bypass system
Hello Simon,
It may have truly “failed”, or it may have been damaged. One of the main destruction pathways for the MDI box is bad connections between the engine and the starting battery. I would have a very serious look into this, including the isolation switch, before restarting the engine with a new MDI box.
The injection pump has a stop lever on it. Use this, don’t interfere with the electric stop solenoid.
Kind regards,
Eric
Thanks, I will check this out. Presumable then the stop solenoid will not prevent the engine from starting even if the MDI is dead?
Simon,
On a conventional marine diesel engine, the stop solenoid is normally energised to stop, because this is the fail-safe pathway.
Volvo engines using the MDI module are mechanically injected and they follow this principle. Once started, they will keep running even without any electrical power.
Kind regards,
Eric
Hi, thanks for really good articles in this complicated area! In the part of this artricle, “Alternative 2 – Split Charging”, do you see any problems by moving the charge bus to the other side of the battery isolator? Alternator connects to battery isolator and the charge bus with a solar mppt controller and a shore power battery charger is connected between the output from battery isolator and the lfp charge bus relay. The reason for doing this is not to “waste” solar power on the SLA battery. Or is this a bad idea?
Johan,
The reason for using an isolator at the output of the alternator is ensuring that a battery remains in circuit in case of a disconnect of the lithium bank because the alternator needs it.
If you have other chargers that would tolerate a removal of the battery under load, you can connect them directly of course.
Kind regards,
Eric
Many thanks for all your help. It is extremely kind of you..
Checking the battery switch my attention turned to the VSR. It is currently connected conventionally, with charge going first into the start battery. I want to change it round so that charge goes into the much bigger house battery, which involves a new battery lead from alternator to house battery and connecting the start battery directly to the MDI. Will this affect the operation of the MDI and alternator? ie: must the alternator need to be connected to the MDI positive terminal for everything to work properly?
Simon,
Connecting the alternator output to the house bank is always preferable, but do yourself a favour and also move the yellow voltage sensing wire to measure the battery being charged. A battery isolator is a better choice than a VSR by the way.
Kind regards,
Eric
Thanks, I fitted my emergency bypass switches yesterday, with the dead MDI unit still in place. They work just fine and they have also made the dead MDI unit come back to life! I started and stopped the engine many times with the switches and with the MDI, which now seems to be working normally.
The code on my MDI unit is P22458510 if that is any interest to you…
Hello Simon,
Then there might not have been much wrong with the MDI box. The only difference is that you have touched the wiring.
The part number you are quoting seems rather unusual.
Thanks and regards,
Eric
Hi Eric,
thanks for your detailed articles.
A have 2 victron smart lithium batteries in series for 25.6V battery, in a solar system that is cycled down to 70% every day (sometimes down to 40% but rarely). I have monitored this for almost 18 months with the Victron VRM system and am pretty familiar with its behaviour.
As you may know, the Victron active balancing on the batteries only works above 28V (3.50V/cell) – so I currently have the system configured to charge to 28.4V every four days for 1 hour to achieve cell balancing (if venus could be configured to use the tail current from the BMV as its switch between bulk/float, I’d use that instead of a fixed time, but at the moment thats not possible).
The rest of the time the controllers switch to float straight away.
Victron recommend a float voltage of 27V (3.375V/cell) – this is in the “charging” voltage range. This is evidenced by the batteries continuing to take current after the fast switch from bulk to float.
I have found that setting the float voltage to 26.7V (3.33V/cell) stops this – i.e. the batteries don’t accept any current.
Would be interested in your thoughts…..
Jason,
The problem comes from the fact that the people at Victron have been marketing lithium batteries for quite some time, but they still don’t fully understand the technology. 3.375V/cell is excessive as a “float” voltage. Your installation is cycling regularly and it is fortunate, because this otherwise shortens the life of the batteries by holding them full as if they were lead-acid. It is unfortunate, but when companies are in the business of selling batteries, there is an immediate conflict of interest between maximising life for the end-user and maximising revenue.
Kind regards,
Eric
Eric,
Great site.
I am in the early stages of assembling by bank of cells. I haven’t as yet sourced the cell interlinks, and am struggling with the copper vs aluminium options. You appear to favour aluminium in the absence of commercially available copper links.
Like Jason P in his comments of 15th January, I am concerned at the effects that a solid bar may have on the cell terminals as opposed to the layered approach with the upward curve in terms of vibration and thermal expansion.
I would be grateful for your thoughts on the matter.
Richard,
Many copper links are solid and way too thick to offer any mechanical advantage regarding expansion/contraction. The bottom line is that a LFP house bank runs cold, i.e. within a few degrees of ambient in the most extreme circumstances and nothing happens.
You can run 6mm thick aluminium flat bars across the cell terminals and it is fine. Just make sure your pack is clamped and assembled first and use slightly oversized holes in the busbars (or elongate them a little with a file) so all the bolts go in freely. It is not more complicated than that.
Kind regards,
Eric
Operating a fleet of yachts, we have had plenty of experience with the MDI units over the last 15 years and we can categorically say that 90% of failures can be attributed to the Volvo start panels and have little to do with engine heat and vibration, Volvo are trying to save some cash with this story – the start panels are not waterproof so the contactors engage periodically which hold the relays inside the MDI on and burn them out. Often it’s the heater plug circuit which causes the damage because the top right button is the power on/heater circuit on button it gets wet first. We have tested this extensively. We moved some of our 60 EVC control panels inside and the only subsequent failures are on the boats with original start panels exposed to the elements. Best advice: Mount the start panel inside or as we have done, manufacture your own aftermarket start panel (only difficult bit is putting a resistor inline to drop the voltage) – we also included a light so you know when the panel is actually on and off rather than relying on the tacho display (also prone to failure)/fuel gauges. We replaced all the MDI’s under warranty but the boats with exposed star panels still replicate the same issue very quickly.
Chris,
Many thanks for taking the time to write, yours is an interesting perspective for sure. The early MDI boxes (like mine) DID break as a result of heat and vibrations, I have photos illustrating it that I will publish one of these days. It is not a “Volvo story” and it wouldn’t help them in any case. In all the later versions of the module, Volvo revised the design to use all surface-mounted parts and also replaced the mechanical relays with solid-state switches. These won’t burn out even if left on and the newer design is more resilient to vibrations. Heat is still an issue on the long term because of the continued use of electrolytic capacitors.
I was aware that MDI problems sometimes originated from the little EVC control panels. It is very interesting to learn that it can be so systematic. Problems with the control panels often materialise as malfunctions, stoppages, inability to start etc. I have never been exposed to these issues because I installed my EVC panel inside from the beginning as a matter of principle.
Building replacement control panels makes a lot of sense, but I have never had the opportunity to reverse engineer their design or investigate the signals on the 4-core cable.
Kind regards,
Eric
Hi,
> but I have never had the opportunity to reverse engineer their design or investigate the signals on the 4-core cable.
These are documented in the D2-40F workshop manual for the electrical system (google will find it) such that it is. Documented, in the sense that you can work out what they do from the tests. One of the cables transports switch information from the control panel to the MDI, including things like the neutral position micro switch. The other 2x CAN busses (1 per engine, joined for 1) with J1939 messages (not NMEA2000) on it. A full list of messages is detailed in the Yacht devices YDEG-04 user manual including the Volvo Penta custom messages (status values and trouble codes). Since most engines with a MDI are not exactly sensored up in the way that a full ECU engine would be, to be honest, I am not certain how interesting the J1939 messages are over one of the generic engine -> NMEA2000 converters which are widely available.
I have a D2-40F (2017) with a MDI replaced under recall, and suspect if it fails I will do as you say, replace the switches with a custom panel and use a engine->NMEA2000 to get data onto the sailing instruments/MFD (currently using https://github.com/ieb/EngineMonitor, based on a ESP32, which seems to work ok to a Raymarine e7 MFD), or use a generic Tachometer from the W+ terminal.
I am very tempted to move the MDI away from the heat and vibration.
Best Regards
Ian
Hello Ian,
We don’t appear to be talking about the same cable here. What you are referring to is the Multilink cable from the MDI box to the tachometer, which contains cores for power and twisted pairs for the engine CANbus. The cable to the small control panel with the buttons is something else. While I have indeed found some documentation about it… it shows a 6-core connection to the MDI box whereas mine is on a 4-pin plug. Have they changed the interface on newer MDI modules, making them incompatible with earlier control panels? Apparently so! Replacing the MDI box on my D2-40B would then prompt also replacing the control panel.
Thanks and best regards,
Eric
Just to share my experience:
I have been using my small homebrew LFP installation now for a couple of seasons (4 months yearly).
It consists of an unmodified LA charger and a standard 125A Yanmar alternator, both connected to charge the LA starter battery. The LFP consists of four 100 Ah Winston cells.
Separate charge and load buses are used.
The LFP is connected to the LA battery trough my custom BMS that limits the LFP voltage to 14.00 Volts and terminates the charge at 0.02 C.
The BMS pass element consists of 4 parallell FETs that can take 500 Amps of current.
These are used as variable resistors to limit the charge voltage, thus avoiding any possible PWM current spikes.
At 14 Volts the charge currents have already dropped so much that the power loss in the FETs is small. The LA chargers peak out at 14.4 Volts, keeping the power loss in the FETs down.
The BMS restarts the charging when the LFP voltage has dropped below 13.3 Volts.
The BMS pass element FET diodes allow for current to pass back to the starter battery, giving some support for starting the diesel. This setup also prevents the starter battery self discharge to too low levels. And it ensures a voltage drop below 13.3 Volts when the engine starts, thus starting again the LFP charge cycle.
The load bus is connected to the LFP battery.
The load bus is controlled by the BMS which disconnects when the LFP voltage falls below 12.5 Volts.
The solar panel is connected in such a away that it only charges the LFP up to 13.3 Volts.
That means I can have a fairly full house battery when I leave for the next trip, and have the solar panel support when sailing.
The alternator charges the LFP to 100% as I motor out of the harbour.
The highest alternator charging currents are limited in practice by the standard alternator and by the voltage losses in the cabling. An empty battery is charged initially by 60+ Amps for a while, but mostly the charge current stays below a safe 30 Amps (0.3C).
There is no cell balancing circuit or cell voltage supervision used. Since nothing is connected to intermediate cells, there are no circuits there to cause potential problems. Cell balance is checked manually now and then.
A 100 Ah LFP house battery has been quite adequate in my case. My battery usage is maybe 30 Ah per day. The solar panel supplies 10 Ah on good day.
Mikael,
It is always interesting when someone engineers something new instead of plugging various building blocks together, so thank you for taking the time to describe it.
The few comments I would make are:
1/ You must have cell voltage monitoring to have a BMS. This is NOT a BMS! It is a kind of charge regulator basically. Making battery protection decisions based on overall battery voltage is not acceptable with lithium cells and the more cells in series the worse it gets.
2/ Since you are not using PWM drive for your FETs, you are operating them in their linear region. They might be good for 125A each when the gate is fully enhanced and the device is mounted on a large heatsink and operating at peak temperature, but the thermal dissipation limit will be reached well before that in the linear region. MOSFETs also have a negative temperature coefficient, so if one starts running hotter than the others, it will carry more current, get even hotter and eventually fail. This kind of application requires very careful design and construction to be reliable.
3/ You write that “at 14 Volts the charge currents have already dropped so much that the power loss in the FETs is small”, but this is only because of the characteristics of your wiring/charging system. If the absorption voltage is 14V, it is reached at full current when the charging system is capable and the current starts reducing from this point on. The gear needs to be able to handle more than the worst-case scenario or it will fail, sooner or later. If the lead-acid battery was some modern AGM type charged in cold conditions with temperature compensation, the input voltage could easily exceed 15V.
4/ When reversed-biased, a MOSFET behaves like a conducting diode and will overheat very quickly if a lot of current passes through, unless it is turned on (and then it conducts both ways). As a result, if the starting battery is under heavy load, your only option is turning the FETs on or watching them go up in smoke… You can’t prevent the engine circuit from completely draining the house battery either, which defeats the concept of having two batteries. In order to implement a bidirectional switch with MOSFETs, you need twice as many transistors wired in a back-to-back configuration.
Kind regards,
Eric
The problem with driving multiple FETs in linear mode is that they require different gate voltages to get balanced current. I built a linear supply using 8 parallel FETs. The trick is that there is one master FET driven by the regulator, all FETs have small drain resistors for current sensing and the other 7 gates are individually driven by fast OpAmps so they carry the same current as the master FET.
Hello Eric,
Great article. I was hoping though that you would also cover how to protect the batteries physically. I have a wood/epoxy composite boat that I want to use an electric motor with. An LiFePO4 battery has several desirable attributes (lighter, more stable continuous voltage etc) so I would like to use an off the shelf 12V LiFePO4 120Ah battery with built-in BMS and a charger suited to LiFePO4. However, how should the battery be physically protected and stowed?
While protection from climate (hot days, cold days) is one consideration, so too is the matter of seawater ingress.
A regular battery box, I assume (it has vents built-in for example), will always let some seawater in. I have read that seawater (and freshwater too for that matter) is bad for LiFePO4 batteries and can release bad things e.g. HF gas. There must be a way to physically protect a LiFePO4 battery, but what to do?
I would appreciate some suggestions on what can be done to physically protect an LiFePO4 battery.
Thanks in advance.
Hello Tony,
Common sense applies here, I suppose. No battery should be immersed in water, shaken or dropped from a great height. Fasten it in a dry location, away from unfavourable temperatures and where accelerations are modest, i.e. not in the bow. Protecting the terminals against short-circuits with a sheet of plastic can make sense, especially on top of the larger battery packs assembled from prismatic cells.
Lithium batteries produce no gases at all, so venting is not a consideration. They are also fully sealed with a pressure-relief cap, so not much should happen even if they become submerged. They will just discharge, decompose some seawater in the process and corrode their terminals. Immersion in salt water is an acceptance test carried out by some manufacturers like CALB by the way. A battery with built-in electronics will likely be ruined if immersed… common sense again.
I would just note that if the cells have aluminium casings, then there is a risk of corrosion over time if they are exposed to sea water. The cells with plastic casings were inert and arguably much better suited to the marine environment.
Kind regards,
Eric
I have winston cells. A friend machined aluminium bits that would fit into the groooves on the side, then two aluminium plates at each end and stainless threaded studs to keep it together. The grooves stop the cells from sliding out when not tightened. The whole contraption sits in a space under one bunk. Two 20x20mm square stainless profiles have a tappet in one end that goes into a hole in the bulkhead and the other end is secured to the bunk bottom with bolts. That way it would probably stay in place even if knocked down, even if that is highly unlikely in the Baltic
I wish I could post pictures here.
Nice board and layout.
Interesting article with good references.
Out of interest, the 2017 Jaycar design controlled inrush into the capacitors using a charge pump on a n-channel mosfet driven by a variable frequency square wave from the PIC. Looking at the product pages and images on this page I can’t see a mosfet on your board so I am wondering how you avoid the inrush of current to the capacitors on startup blowing the fuse ? I had Mk1 Jaycar unit which did draw > 10A for a few 100ms on startup with 1channel and was good a blowing fuses, which was a pain, until I wired a 21W 12V filament bulb in series which would soften the inrush (ok, thats an agricultural solution) . I think the MkII 2017 Jaycar has a 3A fuse.
Perhaps you are using a small SMD Mosfet and I missed it or its not easily visible ?
Of do you use a super slow blow fuse to deal with the surge ?
Hello Ian,
I know about the additional inrush control on the later Jaycar kit, but somehow it has never been an issue here. The fuse is rated 10A for a start, because both channels are driven simultaneously and the driver is more powerful overall. The supply current can be significant at times when a resonant frequency is found and the FET would very much look like the ones in the push-pull stages.
I have played with the idea and investigated a few different design options, but the reality is that the feature isn’t really warranted here. The board also has a feature that allows the addition of a small switch to turn the driver on and off without disconnecting the main supply if desired and then there is no inrush, but the nature of the application requires the system to be powered on all the time, so it is very rarely used.
If I was going to fit a PWM switch in the supply, then I think I would add a few more components around it and have a buck converter to make the driver operate from 12 to 30V or so.
Thanks and kind regards,
Eric
Hi,
I am talking about both cables.
I think the information you want is on page 33 and 34 of the D2-40 workshop electrical manual which you can download from https://www.plaisance-pratique.com/IMG/pdf/MID.pdf Page 33 has a diagram of the plug. Page 34 has the test procedure for each wire.
If there is another cable other than the button and can bus cable, sorry of the noise.
Hope that helps.
Best Regards
Ian
Ian,
Yes, I had found the same document and it does detail the pinout of both cables indeed and it is very useful. I need to have a look at the body of my article again with this information.
My control panel cable has 4 cores only however and I have also found a 2013 version of the workshop manual, but none showed a 4-core cable.
Thanks and kind regards,
Eric
Hello Eric,
My boat is made of plywood, and I understand that it is not the ideal material to carry ultrasonic waves.
What do you think of an assembly, for which a hole would be cut in the hull, in order to pass the transducer, and fix it on a thin stainless steel plate from the outside to the hull, and then glue the plate to the hull?
Could the dimensions of the hole and the plate be increased for a better result, if necessary?
Best regards
Jean
Hello Jean,
Ultrasonic systems don’t work with plywood / wooden hulls because these materials don’t transmit the vibration. There is too much energy damping through absorption. The idea is not transferring the ultrasonic energy into the water. It needs to stay and travel in the hull skin. Going through the hull with a stainless steel plate doesn’t improve the ability of the hull to conduct the vibration. The plate would stay clean and nothing else would happen.
Kind regards,
Eric
Hello Eric
I suspected that it could not work, too bad!
Regards
Jean
hi Eric,
i had a similar problem.
after 5h running, suddenly the motor stopped (in front of the lock!). the power supply was ok upto the black box. it seemed not to transmit voltage to the control panel. i had to shortcut the start circuit to drive further. the next day the control panel had voltage again (we didn’t do nothing!). now WE THINK everything is normal again. but i still have to check that the alternator is loading the batteries.
my engine is brandnew. installed november 2020/ comissioned april 2021!
i reported it to the installer of the engine. he will ask volvo penta about this problem. still lots of questions wil stay.
if i will continue with this MDI module, will some parts be damaged and cause problems on long terms?
if i read it correctly, it is not necessary to have the MDI module? only for start en read the engine functions?
kindest regards
Sven
Sven,
Because your engine is brand-new and under warranty and the Volvo EVC system is normally very reliable, my advice would be NOT to start modifying anything. Check that all the electrical connections are tight, because bad contact/transients can cause the electronics of the module to reset, lock up etc. The fact that the engine stopped is unusual because this requires an action from the MDI module. Sometimes this is caused by a faulty control panel with a shorting stop button that sends the command to the MDI module. Unplug the control panel from the MDI module and reconnect it, making sure the plug is fully inserted and locked. Be aware that your engine could stop (an engine can always stop unexpectedly after all) and see if it happens again, because it could be difficult to get the dealer to do something based on a single isolated event.
When the MDI module fails, you lose the engine gauges and the ability to preheat, start and stop. If the engine is running at the time, it normally keeps running. The engine itself is purely mechanical and doesn’t require any electrical supply to function.
Kind regards,
Eric
hi eric,
thanks for the advice. i (unfortunately) called the volvo penta warranty fund. they sent me to the nearest volvo panta dealer. he checked the mdi unit. he did not find anything. only bad electrical wiring. he did not specified the problems exactly. afterwards they sent me the bill for checking my engine. so they say it is due to electrical wiring, the engine stopped. – what i don’t agree with because: 1) i did 20h running, 2) had no problems before 3) the engine was checked by volvo penta dealer (antoher one) and warranty papers were signed off.
afterwards the problems got worse. the control panel worked on battery 2, not on battery 1. so i think B1 is broken. some weeks later it would not work on both batteries. i was furious and called the original mechanic. he immediately sent me a new MDI; i changed and the panel worked again. (battery 1 is still broken);
i don’t understand the problem. is it possible that some electrical problem/ installation is causing the problem or did the MDI-unit get too hot?
1) electrical installation: ok it is not (yet) up to date. but volvo penta signed off, the motor had run for several hours. nobody can explain the exact problem
2) the MDI unit got too warm; it is bolted on the engine -> see your paper about it, but also the engine cover is close from this box. and there is little ventilation; so i will move the mdi unit.
the problem is volvo penta is hiding behind point 1) electrical problem. i find this unfair, because up until today there is no exact explanation, only excuses.
regards
sven
Sven,
The control panel is connected to the MDI module only. If the installation works from one battery, but not the other, you have some serious electrical problems. Unreliable connections to the battery are also notorious for damaging the MDI module, because of the negative voltage spike caused by the solenoid and starter motor each time they stop.
The first step for you is addressing the problems with the electrical installation. Replacing the battery, all the cables and the battery switch is cheap compared to having to buy a new MDI module. Nobody is going to do anything for you if the circuit to the battery is less than perfect.
The module never gets too hot to operate, it only ages more quickly and fails early as a result of having spent too much time at high temperatures. For you, it makes no difference, 20 hours isn’t long enough.
Kind regards,
Eric
Thank you for this article, and all the comments for the enlightening discussion. At 37 hours, the panel and tach on my 2019 D2-40 suddenly went dark, and this is the only site on the web that I’ve found that goes into any detail about sleuthing this situation. The Penta dealer that installed my engine is looking at warranty options at the moment.
But this failure of black box electronics (the control panel appears to be even more of a sealed black-box, so it seems at least as evil as the MDI) on a mechanically sound and robust engine horrifies me, especially the prospect of failure “out there”.
So I’m very interested to learn more about the possibility of replacing it, post-warranty/pre-cruise, with a less mysterious setup. Please share if you (Eric or anyone) has given this any further thought.
I haven’t tried the jump-start trick yet to resolve my current situation, pending warranty response from the dealer, but intend to try that once their response time exceeds my patience.
Adam,
It is a typical electrical failure of the MDI module. A lot of these are caused by imperfect connection of the starting battery to the engine electrical system. Every time the starter motor and solenoid are de-energised after cranking, a strong negative voltage spike is produced. Using heavy battery cables and good switches and connections throughout ensures that the battery can absorb it and the electronics of the MDI box are not exposed to it.
Regarding the replacement of the EVC system, from memory, the sensors on these engines are made by VDO. The logical course of action would be to match them up with VDO electric gauges. It would be an interesting and rather useful project to document. A bit of trial and error is likely.
In order to start the engine without the MDI module in case of sudden failure, all you need is a big screwdriver. Pull the rubber insulating boots off the 3 posts under the MDI module, short between the middle one and the preheat post to power up the glow plugs for 20 seconds or so and then between the middle one and the solenoid supply to start the engine. There is more information the text of the article.
This is normally easy enough to do not to warrant installing some kind of backup starting system with high-current push buttons over a good MDI box.
Kind regards,
Eric
Thanks for this additional information, Eric. I had a quick turnaround from the US west coast dealer here. My D2-40 is still under warranty and the dealer is local, so my most expedient option was to buy a new box, try it, and if it works, return the original one for full refund. They indicated it is 99% likely to be the MDI; I picked it up and will be trying it later today. Fingers crossed.
I see that the part # of this new one is as per the last version in your list: 23195776 in a box labeled 23231607. But the other number on this new MDI is different my dead one: W2051 vs. W1851. I’m hoping the “18” vs “20” => 2018 vs 2020, and that this indicates some sort of progressive versioning, not just a manufacture date or serial # with no product improvement.
Your comment about the negative voltage spike is noted and relevant. I have one battery bank for house and engine, with what I *think* is a clean route from batt pos to engine pos and of sufficient capacity. But on the neg side the route to the battery is not exactly direct: a bus bar and the shunt for a Balmar SG200 battery monitor are involved. I may reconsider this setup and use a dedicated engine battery if I suffer further MDI failures. Volvo does provide a 1 year warranty on the MDI itself, so that’s something.
Adam,
You can have a shunt and a busbar in the circuit, but all the cables must be suitably heavy and the connections must be good. If you also have an electric windlass in your system, then you should pay attention at the risk of the windlass spiking the engine electrical system each time the motor turns off. The long cabling from the bow is inductive and makes the situation worse. This being said, it is always better to have a dedicated engine starting battery. It provides redundancy, but the usage regime is also too different and this calls for different types of batteries.
The MDI part number reflects the design revision of the module. The fact that there hasn’t been another version for quite some time now suggests that the latest iteration has been behaving quite acceptably.
Kind regards,
Eric
Hello Eric,
Thank you very much that you sharing so much information and knowledge about LiFePO4 batteries. I would like to ask you a question about clamping the cells together. I saw that you use threaded rods and plywood to clamp cells. How much force you apply to tighten the rods (Nm)
and at what SOC?
Kind regards
Hello Milen,
The older cells with plastic casings need to be clamped very tightly, but I have never measured the pressure used. The torque on the nuts at the ends of the threaded rods would depend on the pitch of the thread. I thought about measuring the elongation of the threaded rods and calculating the tension from there, but I never got there.
The newer cells with aluminium casings are different and only need to be clamped enough to be held in place, but electrical insulation must be installed between the cells.
The state of charge doesn’t matter when you clamp LiFePO4 cells, the chemistry is very stable dimensionally.
Kind regards,
Eric
Thanks for the fast reply. I’m using CALB CA100 cells, and wonder how much force to apply to it but no damaged it.
Milen,
You need to clamp these cells. If your end plates are very rigid, you can’t realistically damage the cells. Just clamp them very tight. The casings should not deform.
Kind regards,
Eric
Do you have any comments on the
“Load Dump Protection Solenoid” https://shop.marinehowto.com/products/cmi-lifepo4-150a-load-dump-protection-solenoid
and
“Alternator Protection Device” https://shop.marinehowto.com/products/sterling-power-12v-transient-voltage-protection-device
both sold by MarineHowto?
It seems like the Load Dump Protection Solenoid could have some of the same weaknesses as the Paralleling Switches and Voltage Sensitve Relays discussed in your article, but I’d love to hear if you think it could have a place.
The Alternator Protection Device seems like it could be a single use device if it dies in a load dump event. But do you think it would be effective? Also, might it have a place not protecting the alternator, but protecting the system from back-EMF of windlasses and so on?
Looking forward to your comments. Thanks so much for this tremendous resource.
Cedar,
Well… Let’s start with the solenoid. It makes little sense, if any at all, to parallel the batteries on-demand with a contactor when load dump protection can be provided at all times and seamlessly by using a diode or FET battery isolator on the output of the alternator and/or charger. It gets worse from there because when the contactor is open (engine power is off), “losing” the battery means that the chargers are left connected directly into the loads. Some chargers (wind, PWM solar) simply won’t regulate without a battery in the circuit and it can lead to a wholesale electrical fry-up on board. If the starting battery happens to have its own charging arrangements, then it also has all of the issues of a paralleling switch by exposing the lithium battery to the charging regime of the lead-acid battery of course.
Basically, it is no solution unless a number of additional conditions also happen to be met and it is rarely the case in practice. Even then, there are more robust solutions without the drain of a relay coil to be left energised.
When an alternator (or another inductive source) is disconnected under load, the magnetic field in the windings collapses as the current stops flowing and this sudden collapse is what induces a positive voltage spike at the terminals of the device. This is outside the control of the regulator and the only way to prevent it is keeping the current flowing to limit the voltage while the regulator cuts back. In other words, a load must be maintained. When it comes to actually clamping down a load dump, it is important to understand that this would require carrying the full current that was flowing before the disconnect event until the regulator can react and cut back, otherwise the voltage WILL surge. Such a device would need to be connected to the alternator by heavy cables, not the two laughable little wires and 5A fuse (!) of the Sterling wonder-gadget. Its primary design objective appears to have been to come up with a new and inventive way of absorbing some transient cash out of people’s wallets and the fuse is there first and foremost to protect the manufacturer against warranty claims.
Clamping a positive spike would require TVS diodes or a circuit that conducts extremely fast above a threshold voltage. It is not done because it is not very practical and it is simpler and better to design the system so the spikes don’t happen.
When an inductive load like a windlass or started motor is turned off, the voltage spike is negative and clamping it can be done with a standard rectifier diode to keep the current flowing while the magnetic field decays. Heavy-duty rectifier diodes are readily available and they are not particularly expensive: Vishay VS-150U120D, less than US$30.00. Clamping transients is always best done where they are being produced, so such a diode would need to be placed over the terminals of the motor. It is not normally done because if the connection to the battery is good and the wiring was designed correctly, the battery will absorb the transient as the contact opens and a spark occurs.
The battery cannot fulfill its role of keeping the system voltage close to its nominal value unless the wiring is correct and sound. When a device can be expected to produce problematic transients and these are not/cannot be clamped, then it must have its own dedicated cabling to/from the battery, or connected very close to it with the least possible impedance. The problems happen with shared feeders.
Kind regards,
Eric
Thanks for your thorough answer. Your website, along with the MarineHowto are the most frequently cited on forums as “primary sources” for whatever opinions are being thrown around. So I was interested to see that some of your opinions conflict.
This is my out-of-context analysis of the general concept of using these devices. I have written what I think of the Sterling gadget (others had already asked about it by e-mail) and we rarely, if ever, comment on specific products here.
When it comes to using a relay to parallel the batteries, there will be specific cases where such a thing not only could be done, but it would also deliver the expected outcome. I imagine that Rod Collins must have used it in specific applications where the relay is always closed when the battery is charging and a disconnect would be a problem.
Here, we focus on offering topologies that can be generalised, because people typically build upon them and they must remain valid and robust. If there is a starting battery and a house bank, the alternator should really charge both and using a solid-state isolator is a topology that is very, very hard to go past because it is so simple, robust and reliable and it naturally takes care of the load dump risk if it exists.
Alloy boat owners complain bitterly about the work needed to keep the paint on, How is your paint holding up, and how much upkeep has it required?
What do you think of Vinyl wrap as an alternative to paint for aluminium boats?
Paul,
It has generally been a non-event for 10 years, except on deck on and near the chainplates and the bow roller because of the stainless steel pins. I painted the metal of the hull with International Interprime 820, very costly product, but the best. On deck I used International Interprotect and it has been very good, but I have touched up the odd blister. If I was going to do it all again, I would look for better ways to fully insulate the stainless steel from the aluminium and I would definitely anodise the chainplates and cathead before welding them in. I would possibly make solid high-tensile aluminium stanchions too so they don’t need to be bushed with plastic and insulated.
The problems are not related to the aluminium, but installation/construction where other metals need to be used.
Kind regards,
Eric
I have read your articles and learned a lot but I have a question about charging from the alternator.
How to terminate the charging as I haven’t seen one single BMS performing a correct absorption phase.
Is it OK to perform “bulk”-termination for 2-3 month before a complete charging process takes place?
You have several times pointed out that the cells should not sit around fully charged for a period of time.
How long? 1-2 days, a week, 14 days etc.
Best Regards
Gösta
Gösta,
In order to trigger memory effects, you need to charge partially and then let the cells rest. If you do a partial charge followed by an immediate discharge, it doesn’t matter. Problems really develop when you always stop charging at the same place and don’t discharge afterwards. You can terminate at the end of the bulk phase for as long as you want, provided there is a load on afterwards.
You may run into cell balance problems if you don’t recharge to full often enough and the cells are drifting apart over time. This could be the limit. Some packs are good at staying balanced, others not at all.
The cells must not be left at a high state of charge. You can answer your own question by asking yourself how much accelerated aging you want to cause. LiFePO4 is not a good chemistry for standby capacity service.
Kind regards,
Eric
I was hit by lightning 2 weeks ago. It came down the VHF antenna, into the AIS Splitter, fried the board with a big flash and then went onto the negative supply voltage and on into the engine were it turned on 2 of the 4 011N04L mosfets inside the MDI, turning on the starter motor and glow plugs. That blew some components inside the MDI and almost caused an engine fire, only stopped by quick action after the crew was checked uninjured and the hull and rig were safe.
The quick action was, ignore the electronic stop, try manual stop 3 times, turn off fuel, try again, disconnect batteries, try again. The starter motor was by that time almost hot enough to light up the wiring loom and the boat was full of PVC smoke.
We anchored and waited for the RNLI (UK) to arrive, who were fantastic, checking the boat over and towing us back to harbour, and making us feel happy to be alive on the way.
It seems wrong to build a circuit that can fail in this way. We had other powerful circuits that failed safely, like the keel control ram board which drives a 70A hydraulic pump able to raise a 3m keel. If that had failed the same way as the MDI failed the ram is probably powerful enough to drive the keel through the hull. It had a 600W TSV diode and fuse. The diode failed and blew the fuse protecting the rest of the board and depowering everything. I replaced the TSV and the board has been working ok for 2 weeks.
None of this is reported to Volvo Penta. The engine is not in warranty being 4 years old, and I don’t want another MDI onboard. The MDI has been removed and replaced with a lash up of relays, push buttons and standard gauges to get to my home port, now arrived, where I intend to do a proper job.
Some of the other electronics that had protection survived, some did not. The VHF after the splitter had ferrite clamps on all wired and was unharmed. The masthead LED light was unharmed, but deck level nav lights were all blown. Speed Transducer hall device was blown, but depth sounder unharmed.
Ian,
Yours is both an unfortunate and interesting account. The issue with lightning strikes is one of unpredictability, but more importantly, nothing will withstand the energy level of a direct strike, so there is no ultimate protection. A 600W TVS diode is ridiculously small, a fuse will simply arc over and do nothing if enough energy is involved. The MDI box contains several TVS diodes and some are larger than the one you mention. Ferrite beads provide no protection. Marine electronic equipment is always surge-protected to a point because it is potentially exposed to nasty voltage transients from starter motors, windlasses etc. It all comes down to how much energy the circuit is exposed to.
The key issue in your case is that the strike went to the water by the way of the engine block. The lowest resistance path was through the heavy gauge wiring to the MDI module and it blew the MOSFET switches because they were in the way. MOSFETs nearly always fail short. If that happens, the glow plugs and starter motor will become energised continuously afterwards indeed. Had the engine battery switch been open, the strike might have taken something else out and the engine would (most likely) have come out unharmed.
In thunderstorm weather, it is highly advisable to disconnect antennas and turn all electrical systems off. Two-pole battery switches do a much better job at protecting the electronics than the almost ubiquitous single-pole devices: if a device has no negative connected to it, it doesn’t become a potential pathway to earth so easily. If it gets into some wiring, the strike will always try to flashover to the negative somewhere, because the negative is tied to the engine block and the engine is connected to the water through its cooling system.
Your story highlights the importance of planning for the unexpected and having contingency plans. A lot of the time, if something goes very wrong, it will do so too quickly to be able to rely on any outside assistance. The crew has to deal with it.
The mechanical stop will normally kill an engine that is running quite reliably, because it directly cuts out fuel injection. In your case, you were fighting the starter motor as well, so having disconnected the starter battery first was a prerequisite. By the way, there is one (very rare) other situation where a diesel engine can get out of control. It is when it is overheated and begins to run off oil fumes from the crankcase and rev up uncontrollably. The only way to stop it then is blocking the air intake, which can be difficult and dangerous because of the heat, but it has to be done at almost any cost. An engine that revs up for no reason can also indicate a LPG leak inside the boat: rare, but good to know.
If the hydraulic ram from your lifting keel is able to pull the keel into the hull, you have a serious engineering design issue on your hands. It is not fail safe. An inexperienced crew member could do it. It should stop mechanically and the flow should go over pressure the relief valve long before structural damage can take place.
Kind regards,
Eric
Hi,
The MDI on my D2-40F was installed with no fuse between the MOSFETs that went short circuit and the supply. The supply was connected directly to the starter motor supply. My MDI was replaced under warranty 3 years ago, so I assume it was installed as per Volvo Penta’s instructions. Both TSVs in the MDI were charcoal, assuming they were TSV’s, it’s hard to tell from the remains. Each was at one end of the 4 MOSFETs, only the center 2 MOSFETS connected directly to the +12V supply were short circuit.
*if* there had been a 50A fuse on the supply to the MDI, then both TSV’s shorting it might have fused it after the strike cut power to the MOSFETS avoiding an engine fire. The max current I see under normal operation is under 40A. The strike would certainly jump a fuse, but 12v wont. Most cars fuse everything in the engine bay, with 40,50,80 or 100A fuses, strange Volvo Penta doesn’t fuse the MDI supply.
I agree, there probably isn’t a TSV large enough to take a direct hit, but the fuse + TSV combination did save damage post strike. It failed safe. And yes, there is a mechanical pressure release valve designed to allow the keel to swing up if it hits something at speed. Still, I was glad the hydraulic pump was not stuck on running after the strike.
Best Regards
Ian
Ian,
I have always seen the MDI module installed this way. It has two supplies from the battery, one for the electronics and one for the starter/glow plugs circuit. Volvo added a fuse to the first one some years ago, but the other is never fused. The current there is about 10A per glow plug, plus the starter solenoid current if you happen to crank before the glow plugs have turned off. You could certainly try to fuse this circuit as well, but if you have to fuse a circuit too high, it might not blow anyway, or not before the wiring melts. If you fuse it too close to the limit, like 50A, it will blow one day for no reason after having been stressed too many times and it will represent a new reliability problem. TVS diodes are only good to absorb short transients. It is a small component. It is unlikely to hang in there long enough to blow a big fuse.
It is normal that only two of the four MOSFETs failed. They are installed in a back-to-back configuration to block the current both ways. The two that were reverse-biased and able to conduct without being turned on survived.
Implementing solutions to cater for the rarest and most unlikely of situations is not always the best idea. Sometimes you create new problems that have a much higher probability of actually occurring. As I pointed out earlier, turning the engine electrical system off at the battery switch would have eliminated the issue and using a 2-pole battery switch would have also most likely protected the engine electrical system and the MDI module. I turn the power off to my engine with a 2-pole battery switch when I am not using it, because not doing so is potentially inviting corrosion problems. It is also simple and highly reliable.
Nevertheless, what has happened to you is very interesting because it is so unusual and it is good to know about it.
Best regards,
Eric
Hi Eric,
I have installed 4 Winston cells in my RV. When I return from a trip, I discharge my Battery down to 12,8 V. Then I set my triple Votronic charger to 12,8 V constant voltage and connect it to the mains.
The charger combines solar + AC + Generator into a single charger. All loads remain connected, but most of them are off anyhow. As a result my Battery is kept at 12,8 Volt at all times, with a maximum output current of 25 A. In wintertime I can run my heater to keep the temperature above freezing.
Any comments?
Cheers Hans
Hans,
This type of arrangement allows the battery to discharge quite significantly for storage when its capacity is not needed. It is very good for battery life and much better than cycling unnecessarily.
Kind regards,
Eric
Hi Eric,
thanks for your confirmation!
Very interesting your explanation of the correct termination current for a 100% charge!!
Just to make sure, that I unterstand your table in a correct manner:
Charging with 3.5 V CV means that the Voltage drop at the cell impedance is 130 mV above the OCV of 3.37 V at 100% SOC. For a 100 Ah cell, the termination current would be 0.015 C = 1.5 A.
I conclude, that the actual DC cell impedance is 130 mV / 1.5 A = 87 mOhm at 100% SOC.
I assume, that the DC cell impedance drops to much lower values at lower SOC values.
Any idea about the function of the DC impedance over SOC?
Servus from Bavaria
Hans
Hans,
Yes, you can look at it this way, but since we are dealing with DC current only, there is no reactance component involved and the impedance is the internal resistance.
The internal resistance of a cell is initially influenced by the manufacturing process and then it is temperature-dependent and increases throughout the life of the cell as it ages, so it is not something that can be quantified and relied upon without actually measuring it dynamically on the battery in service. It makes it quite problematic to use for practical purposes. It is used in some advanced BMS algorithms for estimating remaining capacity at a given load based on the low voltage cut-off threshold.
There are plots of internal resistance vs SoC in the literature and they sometimes show these relations with temperature and cell health.
Here, the discussion about termination is intended to address the real-world issue of overcharging when the available charging current is below the termination current, which can happen quite easily with solar under very poor conditions.
Kind regards,
Eric
Hi Eric,
Thanks a lot for all your articles on LFP battery banks, they are a great source of information and confirmation of my own research on the topic.
I scratched my head a bit to find the best way to solve the dual bank / dual chemistry issue for good and I may have found a way to allow properly charging an SLA bank (which could be the start / backup / shore battery bank) without having to rely on a single-point-of-failure DC/DC charger to correctly charge the LFP bank, and ensuring that the alternator’s current still has somewhere to go in case of a ‘hard’ HVC.
The idea is basically to use the isolator configuration (possibly using an efficient FET ideal diode for the high current LFP branch, and a simple Shottky for the SLA branch) and exploit the fact that charging voltages are generally higher for an SLA than for an LFP bank. A DC/DC charger configured with a charge curve adapted to SLA, which would turn on only when the engine is running (thinking of a Victron Orion Tr Smart 12/12 30A for this task) could be wired in parallel to the diode on the SLA branch. This way:
– most of the time the SLA is topped up via the charge sources and the Schottky diode / isolator
– all the ‘raw’ charge regulation is based on sensing voltage / current on the LFP bank. The SLA bank is an ‘add-on’ to the LFP, not the other way around
– when the engine is running, the SLA is properly charged via the DC-DC charger as the voltage out of the charger is likely to be higher than the charge bus voltage (ok, for a time the SLA float voltage may be a bit lower than the charge bus voltage needed for the absorption phase on the LFP side, but that’s not a huge deal)
– in case there is an HVC event and the LFP is disconnected from the charge bus, or there is a surge on the charge bus, current can flow through the isolator into the SLA. In that case the DC/DC charger does nothing
– if the DC/DC charger fails, the system still works well (the only downside becomes that the SLA bank is not charged properly until the DC/DC charger is fixed or replaced, which is acceptable)
I would be happy to have your opinion on that relatively simple improvement on the isolator setup, especially if you can spot a possible issue that I may have missed!
In my case I am considering using a reasonably sized AGM bank (2 x 120Ah) as the SLA bank because:
– I have spare room available which I can’t really use for anything else than batteries
– AGMs are not that much more expensive than basic SLAs and can be installed in any orientation (which helps filling the spare room mentioned just above!)
– this would provide a very comfortable backup / emergency battery bank and leave a lot of time to investigate / fix the LFP side in case is an issue there
– they can easily become the house batteries when the LFP bank is fully disconnected (and maintained at low SOC) if the boat is moored or on shore for a long-ish time. As we are liveaboards with fully electric cooking we will cycle the batteries a little bit when using the ‘PowerAssist’ feature of the big inverter when hooked to the shore power, so it’s better to cycle a ‘cheap’ AGM bank than the LFP.
It seems that you are NZ-based, so am I, and speak french, so do I, so I can wish you a ‘joyeux confinement’!
Thomas
Hello Thomas,
The best results when charging both a lithium and lead-acid battery through an isolator are obtained with a Schottky diode isolator and not with FET isolators. The reason is that the voltage regulation point is at the lithium battery and the voltage drop over each branch of the isolator is higher at high current. So:
– While the lithium bank is bulk charging and the current is high, the voltage at the input of the isolator is higher (up to 0.9V typically).
– The voltage at the lead-acid battery is typically 0.4-0.5V below the isolator input voltage, because it doesn’t normally accept as much current.
– The end result is that the lead-acid bank can charge at 0.4-0.5V above the voltage of the lithium cells while the current is high on the lithium bank and the voltages equalise out as the lithium cells go into absorption.
A DC/DC charger is only there to finish the job and it doesn’t need to have a large capacity.
Kind regards,
Eric
Hi Eric,
Thanks a lot for your comments. I had well understood how the voltage drops on either branch of a Schottky isolator played in ‘our’ favour but I am not very happy about wasting precious watts (whether they are solar, breeze or diesel watts) as useless heat in the isolator. If they are diesel watts, these wasted watts are likely to lead to longer engine run times if the regulator ends up having to limit the alternators’ output to protect them because of the additional power required. With electric cooking, the LFP bank is generously sized and as I don’t want to run the engine all day the charge currents will be significant (~400-500A). I have considered switching the LFP bank to 24V or even 48V to reduce the currents and the effect of voltage drops but this added too much complexity to my taste on the loads side.
Hence the FET ideal diode, the requirement to increase the voltage on the SLA/AGM side to charge it properly, and the DC/DC charger (30A is not that large for a 240Ah bank, and I haven’t actually been able to find a smaller 3-phase ‘marine grade’ DC/DC charger.). A tad more complex, certainly more expensive, but significantly more efficient and provides a much better control on the charge of the start / backup AGM bank…
Thomas
Thomas,
Energy efficiency is something we should certainly be concerned about, but the losses over a diode isolator seem almost irrelevant when compared to resistive losses throughout when currents get to the nonsensical levels you are quoting.,The worst part is still to come however.
Running a combustion engine to enable electric cooking roughly leads to the following main efficiencies in the energy conversion chain starting from the fuel and finishing with the input into the stove:
Engine (30%) -> Alternator (65%) -> LFP Battery (95%) -> Inverter (90%)
The overall result is an abysmal 16.7% and this is assuming that the engine is in fact loaded properly. If you are only charging, it is not, and the end result is closer to 10%. Burning fuel produces heat, 90% of which is wasted, and you eventually turn the remaining 10% back into heat. If you need heat and you are going to burn fuel to get it, at least use that heat directly!
Electric cooking on board is profoundly inept and stupid unless you can do it all on renewable (i.e. solar) energy. Since most of the stove’s energy consumption practically arises from heating water, using an electric kettle when sufficient renewable energy is available can very effectively displace a lot of the LPG consumption with minimal cost and added complexity. I do it all the time in summer.
Eric
Hi Eric,
As it turns out we already make good use of the engine to directly heat our water, which does not require much additional energy to be brought from ~80°C to boiling point. Our stove and oven are mostly used to heat / cook a lot of other things than just water!
We are planning to have a sizeable array of solar panels indeed but as we usually run the engine 2 or 3 times a week for other reasons than solely power generation, and virtually never at full throttle, we are keen to maximise the amount of energy we can top up the batteries with using the 10-ish additional hps that the engine will easily produce during these periods. Hence our willingness to avoid wasting half a kW on the way if we can!
Thomas
Thomas,
There is no such thing as a good way of doing the wrong thing. Consuming an extra 10HP for battery charging to use the energy for heating later just means that about 9 out of these 10HP are going to waste. It translates into burning 2L/hour of diesel to achieve the same outcome as burning 200g of LPG, which is also far cleaner. Using engines and gensets to support electric cooking is fundamentally idiotic and running an engine isn’t an efficient way of heating water either. This kind of thinking belongs to last century and today we are staring straight in the face of what it has delivered. A boat is pretty good platform to smarten up and sort out energy matters in a sustainable way.
Taking an extra 10HP or so at low speed out of small pleasure craft diesel engines is usually enough to void the manufacturer’s warranty, because they are not designed to handle a lot of torque and it causes them to fail early.
Eric
Thank you for your reports. Just finished installing a D2-75 in my 42 foot sailboat. 10 hours so far.
Is there any way to get my purchased Volvo voltage and oil gauges to function?? They have the same
superficial appearance as the tach and temperature gauges.
My brilliant Volvo dealer had me buy these gauges (I insisted on an oil gauge).
Temperature works.
I discovered the engine’s oil sensor is a switch for panel alarm. Could I buy a 0-10 bar sensor and manually interface with the gage (means understanding the three-wire connection; i.e., disconnecting its daisy-chain)??
Regards the voltage, could I simply run + – from the MDI to the the new gauge ??
Fritz,
The MDI module outputs engine data over CANBus using J/1939 protocol. The tachometer decodes this and passes the information down the 3-wire daisy chain. The daisy chain uses a different digital communication bus, the name of which eludes me at the moment. It carries power and data to the gauges. You can’t hack into it because it will only tolerate one communication “master” and it is the tachometer.
The MDI module only reads engine temperature as an analogue value. Oil pressure is not measured, only whether it is above 60kPa using a pressure switch. This means that an oil pressure gauge cannot work in the daisy chain because the data is missing. In order to display oil pressure, you would need to add a sensor on the engine block and connect it directly to its own compatible gauge, electrical or mechanical and completely bypass the MDI module and tachometer.
Regarding the voltage, if your new gauge plugs into the daisy chain and doesn’t work, it probably means that the battery voltage data is also missing. You might be better off leaving this to a battery monitor that can measure more than just the engine starting battery.
If the data is not there, you won’t be able to do anything with these networked gauges and you should return them. They will only work with the bigger electronic engines where the ECU measures almost everything.
I suspect that the Volvo gauges could be manufactured by VDO. Their engines use European-style sensors in all cases.
Best regards,
Eric
Thank you much.
The outstanding question is why a Volvo dealer sold me the voltage gauge.
They did replace the oil gauge and am trying to configure.
Can I use a +12v terminal from the MDI to drive the oil gauge ??
Where can I get a schematic for the MDI ??
Fritz,
I have no idea about what your voltage gauge is and how it is supposed to get its data.
You can get power for your oil pressure gauge from the red wire at the end of the instruments daisy chain. Otherwise you have to cut into the Multilink cable between the MDI module and the tachometer and take it off the red wire (and black is the negative).
Search the internet for “D2-75 workshop manual group 30” and you will find some useful information about the electrical system on these engines.
Kind regards,
Eric
Thank you again.
Hi Eric,
I’m a sailor with vague ambitions to build my own boat one day; I’ve found your page a mine of information and I very much agree with your design philosophy. Thanks for your willingness to share your expertise with the rest of us. Just wondering if I could ask you a few questions:
You often talk about sail area and how it is designed around parameters like displacement and waterline length. Had you considered adding a bowsprit to increase the fore triangle area and what were you reasons for not (structural, balance issues, aspect ratio, etc)?
You say that your usual expedition payload is a ton and a half or so. What does this look like in practice? Is it mainly provisions and hardware for the boat or is a large proportion made up of things like shore going kit, dive gear, etc?
How would you change the design of Nordkyn if you wanted to carry more or less payload?
What are your thoughts on 1970s era cruiser racers such as Contessas and S&S design (the less IOR oriented ones) in terms of hull form, stability and seaworthiness?
Cheers,
Greg
Greg,
Adding a bowsprit would unbalance the rig unless the boom was also lengthened and it is very long already. The total sail area would also become unreasonable. When I first went out under sail with Nordkyn, I had a near-empty boat and it was quite flighty even with the deep bulb keel. This was expected, because I designed the boat in ocean cruising trim. A bowsprit would be useful for flying an asymmetric, but it is not a necessity and features that rarely used are often best left out. It would need to be retractable in order not to become a problem and it complicates the situation around the bow and with the anchor locker.
In terms of payload, a year’s worth of provision for one or even two people is not as impressive as one would expect. The weight is made of cruising gear (dinghy etc), tools (very important on long voyages in remote places), various materials, books, charts and other documents on top of the provisions and water.
If you start carrying scuba-diving gear, compressor and the like, you can quickly blow your weight budget, but there again, it is a matter of priorities. Someone who sails to dive could decide to do it, but carrying it just to have it makes no sense to me. I do have a self-built hookah-type arrangement however, it is important for cleaning the hull.
The payload to be carried is what led to the hull length of Nordkyn. I would have been happy with a smaller boat. If it was going to carry hardly anything, it could be as small as 38′ maybe and a bigger payload would lead to a longer boat. As a boat gets longer, its length/beam ratio increases naturally, because stability increases more rapidly. I wouldn’t expect much else.
S&S designed quite a few of the Swans in that era and they made very decent sea boats. I owned and sailed a 1968 Dufour Arpège for many years and it was an excellent (but not perfect) sea boat overall with its fin and bulb keel. Its very high sail area/wetted surface ratio made it outstanding in light weather. The Contessa 32 is a dangerous boat in a fast following sea and I don’t think you could even pay me to go to sea in one of them. Too much wetted surface and sluggish when it would be the most enjoyable to sail.
Kind regards,
Eric
Hi Eric
Thanks for sharing sharing this interesting article. I can tell you put effort it to making it clear and thorough.
I have question about this:
“Lower voltages will fail to charge it extremely quickly and voltage cannot be used as a mean to control the outcome of charging as a result and absorption voltage alone has no bearing whatsoever on the final state of charge reached.”
Is the absorption voltage an upper limit on the battery voltage?
If so, would setting a low-enough absorption voltage effectively limit the state of charge?
If so, does this mean that the absorption voltage can have a bearing on the final state of charge reached?
I’m not sure if this is a semantics issue or if I am misunderstanding the physics. I am new to these concepts.
Thanks,
Eric Bakula-Davis
Eric,
The absorption voltage is the highest voltage the battery is allowed to reach during its charging cycle. Setting a very low absorption voltage makes charging ineffective and can certainly prevent full recharging, but the state of charge reached is extremely sensitive to both the voltage and the length of time (i.e. absorption time) this voltage is maintained for, so it is not a practical way of limiting charging.
Kind regards,
Eric
Thanks Eric. That clears it up for me.
Real nice job, congrats !
Just for info what is the thickness of this forebody bottom plate ?
Pretty strong curvature, must have been a real challenge to put in place on your own !
The whole bottom plating is 5mm, except around the keel where it is 8mm. I rolled and pressed the plate in a V-pattern from the outside towards the centerline before putting it in. I only pulled it quite minimally. Just pulling it in would be impossible, the material is incredibly stiff.
Kind regards,
Eric
Hi Eric, I have studied, read and reread all of your articles. I have learned so much. It’s almost a higher education on sailing and hull dynamics. Hope you’re doing well and enjoying the adventures sailing. Question: do you know the design of the Salona 41? Although in GRP (solid under the waterline with vinylester resins, steel frame) it has – in my thinking – more or less the same hull shape (also 2,25m lead bulb keel option). I really like the design, build-quality and such. Could you express your opinion on this vessel? Would it be seaworthy enough? I have a bit of doubt about the weight though (7,4t). https://sailboatdata.com/sailboat/salona-41
Hans,
I didn’t know this design, but I found a profile drawing. You are right about similarities with the Nordkyn 13, they are around the same area in the design space. I don’t see an issue with the 7400kg displacement advertised, but this is an empty boat and they really mean empty. It is not a realistic sailing condition. The hull shapes are quite different however. The Salona is deepest under the engine/companionway as many cruising boats are. It creates more headroom and volume further aft, but it also results in a strong curvature upwards towards the transom after that. At high speeds, it can cause flow separation and the hull resistance to shift forward. Because the longitudinal volume distribution in the hull must be preserved, it also prompts for a narrower waterline aft to compensate. This makes it easier to obtain a hull that won’t trim bow-down when heeling, but it is not as powerful and it prevents lifting some of the hull out of the water upwind. The upright wetted surface will be slightly less, but it won’t reduce much when heeled.
The Nordkyn 13 is deepest just aft of the mast and it has a lot longer and much flatter run into the stern. All the ballast is also concentrated into the keel bulb and it makes a more powerful boat that can reach very high speeds while maintaining perfect control at the helm. I designed it this way to optimise the handling in long fast following seas and gain more power and upwind performance, but it was very difficult to achieve. It took 3 years of sketches and analysis to gradually get there.
Kind regards,
Eric
Thanks for the valuable information about lithium technology.
When Lifepo4 batteries are used as a service battery on a boat, we know that installing a current-limiting DC-DC charger on the charging line with the alternator prevents the alternator from overheating as well as charging the lithium battery with a safe charging current. While the DC-DC charger used is in operation, I understood that the lithium battery charge could not be completed properly, since there is also the consumption of the working devices, and the charging cycle designed according to lead-acid batteries, always trying to keep the battery full, prevents this. This can be a problem on long engine journeys.
I looked for a way to at least protect my existing alternator from the sudden HVCutoff action of the lithium battery. I deliberately disconnected one of the brushes that constantly feed the rotor warning of the alternator and soldered two wires to the cut points and pulled it out of the alternator. When I disconnect the terminals while the alternator is running, the charge is cut off. When these terminals are brought into contact again, the charge continues from where it left off.
With a small voltage sensitive relay, I can safely switch the alternator charge on and off depending on the system voltage level. Can you suggest a safe charge cut-off voltage that will ensure the longest life of Lifepo4 batteries?
Volkan,
No, you can’t do that simply because a BMS will trip the battery based on the voltage of any single cell, not the overall battery voltage. The BMS must supply the signal to stop charging before tripping the battery. If you can’t do that, your only option is diverting the current to a lead-acid battery.
Interrupting the field is the way to disable an alternator indeed. Solutions that don’t involve running the alternator current through electronics are more efficient and reliable.
All the best,
Eric
When I looked at the CARD detector and Alarm circuit for a friend it was rather a simple circuit.
The detector diodes were readily available in SOT23 BAT series. I even tried Macom detector SOT 23 diodes.
The Amplifiers were LM388 and the Alarm circuit was dead simple LM3914/LM3915 LED bar driver.
I can dig up all the circuit details. The diodes had a small bias circuit in the head that delivered 50 ua of bias current to increase sensitivity.
When I measured it, it had -55Dbm sensitivity.
I have a Lokata watchman on my boat, if you looking for a replacement that is easy to repair then this is the one to look out for. Any ceramic microwave diode will work like the 1N23 or the small package detector diodes. You can rescue them or buy microwave alarm sensors and rip them out from them.
The reason I like the Lokata is that it has a demodulating mode where you can hear the radar chirp signatures. So if you dont want an annoying alarm going off you can just listen to the CHIRP / doppler sounds. Some boats had peculiar radar signatures I remember seeing a boat in sea then when I sailed in port and heard its squeaky radar I knew exactly what ship it was. It was a North Korean ship that had chirp that sounded like a rusty wheel that needed greasing.
I had both the Lokata and CARD on my boat for testing and I found no advantage to the directional display of the CARD.
Another interesting unit that I have in my collection is a very old Tamaya Marine check radar detector. Its rare as hell. It was the size of a transistor radio and used a 1n23 detctor diode. It had a nice alarm that sounded like a submarine sonar ping sonar. It was super sensitive and i could leave it laying on the chart table and it would detect S and X band radar. It was designed a by experts. It has a plastic lens antenna that you plugged into the waveguide and you could go on deck and direction find the direction of the ship.
Merveille in France makes a copy of the CARD or it has the same concept as the card. If you dont want to fix your CARD buy a merveille marine radar detector. All the mini 6,5 transat sailors love their units
This is a great post, thank you!
I also reversed engineered my CARD device and extracted the schematic in order to repair it. I think you mean LM387 for the signal amplifier. My CARD had failed detection diodes amongst other defective components and these diodes were marked “SH1”, in SOT-23 package. Any Schottky diode can be used as a microwave detector, but some will work better than others. I couldn’t find what they were with absolute certainty, but my best guess based on this marking was Skyworks SMS7621 and I bought some. I also tested with Avago HSMS2860 diodes and played with the bias current by replacing some resistors. This seemed to improve the sensitivity. Detecting the S-Band radars used by ships was always very easy, but the small X-Band pleasure-craft pulse radars were much more challenging. Early CARD units used DDL6672 axial-leaded diodes, as per the US Patent that covered them. Which modern component would give the kind of detection performance that seemed achievable with the old 1N23 is still an open question.
I still own my repaired CARD detector, but it has not seen a lot of use lately because of the type of sailing I have been involved in. Rain radars operated by meteorological services are also in the S-Band and they set off radar detectors every minute or so over hundreds of miles, so coastal use is now out in New Zealand. Last year I was fortunate enough to acquire a brand-new, never used “old” CARD 060 system and I am going to compare its performance against the one I repaired.
The increasingly widespread use of low-power broadband radars on small vessels is a problem for radar detectors. They operate in the X-Band as well, but the power levels seem too low. I haven’t had the opportunity to test whether they could be detected by a CARD system even at short range.
Kind regards,
Eric
Hi, I’m curious how you’ve wired your D2-40 and alternator. It looks like you have a direct run from alternator to starter battery, and a negative from the engine ground lug direct to battery. Same with starter solenoid? Ie two connections to starter battery positive terminal with the one ground connection? I assume your alternator connects to the engine ground lug? Any details you can share would be very helpful! I’ve been trying to figure out the best way to make a direct battery connection for the alternator while also providing a good connection to the starter.
Will,
I run a house bank as well as a starter battery. All the batteries and the engine share a common ground (the Mitsubishi alternator has a grounded body anyway). There is a battery cable from the starting battery positive to the starter solenoid post of course and a dedicated cable from the alternator B+ to an isolator to split the alternator output between the two battery banks.
The alternator output and the starter don’t have to be connected together at all. It is just a shortcut when there is only one battery involved and the factory cable is too small really.
Please note the voltage sensing input at the back of the alternator (yellow wire on factory engines). This is also wired to the starter solenoid post, but it needs go to the battery to be used to control charging for best performance. In my case, it goes to a VRC-200 controller to make the alternator programmable.
Kind regards,
Eric
Hi guys,
I had an interesting episode this week with my boat –
I have a D1-30F Installed, 3 years ago by previous owner, 212 hours.
The engine when i purchased the boat had an issue where a low battery / no charge alarm would sound, despite there being 13.80 + volts from both the starter battery and the leisure battery.
The previous owner had a Volvo penta dealer inspect this fault to no avail – the alternator was taken away for testing and was found to be working perfectly.
i have only had this issue intermittently but confident it is not that much of a problem.
this week however i had a serious issue.
as i was attempting to dock at a mooring the engine died for no reason, i had to quickly attempt to restart the engine which it did.
later on the way sailing home i decided it was time to take the sails down and get the engine started again – the engine would not start and the screen on the control panel just displayed “stop” as if i was holding down the stop button. it was a dangerous situation as i was getting into confined space on the river in portsmouth harbour and for a brief second i had no control over the boat as the wind had stalled behind some buildings.
i had to again attempt to restart the motor which i struggled to greatly. i got it started and it intermittently kept on trying to stop running as if someone was pressing the “stop” button on and off with no pattern or rhythm.
Fortunately i did not have the issue again and safely got back to my mariner but it was quite a scary moment when your pride and joy could potentially crash as i have no wind or engine control.
once moored up i could not get the issue to repeat itself, however using my amateur automotive experience i thought potentially the “stop” button was getting stuck in or such the like.
upon returning home i did some investigation on the internet which has lead me to this thread.
from this point and with a disturbed nights sleep of thinking about the issue (haha) my thoughts are as follows:
i. potentially the winter weather has got into the engine control panel and maybe my “stop” switch is playing up
ii. upon reading this thread maybe there is an Issue with the MDI on my engine, and after it has had time to get excessively hot under normal operation, this issue has arisen.
iii. potentially there has been a long term issue with my MDI hence the “low voltage” / “no Charge” error is being displayed on my engine control panel intermittently.
if anyone could share their thoughts with me regarding my issues and where i should go from here. at the moment i am not inclined to take the boat out due to this potentially dangerous issue as I’m sure everyone can understand.
I would like to thank everyone who has contributed to this great thread and i look forward to any information which may be available.
Thanks again in advance,
Charlie
Charlie,
Your issue with the engine stopping is typical of what happens when moisture enters the small engine control panel. The stop button appears to be shorting out intermittently and sending the signal to the MDI box. It is possible to re-dry the control panel by placing it in a warm dry environment for some time.
I would expect the charging issue to be unrelated and completely independent. The MDI box relies on the connection to the D+ post of the alternator to determine whether it is charging or not. You could have a bad connection or a broken wire there, or an alternator with an issue with D+ (in which case it will still charge and appear to work properly when tested, unless D+ is tested specifically).
Kind regards,
Eric
Eric Thanks for your reply
Since Posting my last post I have Relocated the MDI like you have in you original post : thanks so much btw:
today i still had issues but like you say in your last post i feel it is moisture ingress in the button panel. i am currently in the process of ordering some polycarbonate to completely inclose the buttons / Rev counter etc to mitigate this. (we had some rain over the last few days)
I also checked on the volvo penta website about the recall status of my MDI – it appears it has already been recalled according to them but i have emailed them anyway to check.
again thanks again for the amazing thread.
Charlie
So i Dried out the Buttons thoroughly but they were still intermittant but the frequency reduced drastically – i had volvo penta come and look for a potential warrenty claim. from this thread alone i was more knowledgeable than him about the whole issue.
I ordered a new set of buttons and installed today (took 4 mins)
Hopefully all will be good now!
Charlie
Hello Charlie,
I find it best to keep this little control panel and the tachometer inside the boat. Keep the old panel and store it in a warm, dry place, it is likely to recover completely over time.
Thank you for the update and all the best.
Eric
Hi Eric, and thank you for your excellent & informative articles! I recently installed 3 x 300ah “drop in” lithium batteries (Kilovault), which I configured as shown in your “Alternative 1 – Lead-Lithium Hybrid Bank” in order minimize complexity. The lead battery in my case happens to be a group 31 AGM (Firefly) that I had left over from the previous house bank. I have a 400A Class T main feeder fuse (located as shown in your diagram), and a 250A MRBF fuse on the positive terminal of the AGM battery. I’m also installing your VRC to manage charging from my stock Volvo/Mitsubishi alternators.
As luck would have it, as soon as I finished hooking everything up, I ran across an online discussion warning emphatically *against* paralleling LFP and lead in this manner. The stated concern was that the lead battery could suffer an internal short, and the LFP bank would then discharge all of it’s (considerable) energy into the failed battery, potentially resulting in a meltdown/fire.
So I wonder what your opinion is re this scenario. Is it a significant risk? Does the fact that the lead battery is AGM reduce the risk of failing with an internal short? Does fusing the lead battery mitigate the risk (I could obviously downsize from the 250A)?
Thanks for your thoughts!
Jeff
Jeff,
First of all, a 12V lead-acid battery is made of 6 independent cells in series. It won’t “short”. One cell could fail and develop a short over time, but it would just turn a 12V battery into a 10V battery and it would start to drain the one connected in parallel. The argument is nonsensical. Lithium cells are commonly paralleled to achieve larger capacity and the risk would then be much higher.
AGMs are some of the least likely to fail unpleasantly because the plates are tightly packed with fiberglass matting. This is what gives them their superior resistance to shocks and vibrations.
Kind regards,
Eric
The marketing of so many production ultrasonic systems is soooo over the top, it’s hard to know what to believe.
So I was googling for diy ultrasonic antifouling, hoping to find some gurus … and bam found this site.
What great, honest, backed-up content !! After reading the articles I was about to call it a morning but decided to click around.
Well, I think my whole day is shot, not sure what to read first … Nordkyn, lithium series, etc
THANKS for a great site.
I love your dry humor … “just to keep the water out.”
Thanks for some very informative articles.
I have a home-grown setup that has been working well for me for the past 7 years. But now I have some new questions.
I am using 4s 300 Ah Winston cells. They are charged using a Blue Sky SB3000i MPPT controller, plus their IPN Pro remote, which is capable of terminating charge at a set absorption voltage (currently set to 14.4v) when the current drops to a set amount (currently set at 0.015 C = 4.5 amps). Apart from the voltage being at battery level rather than cell level, this seems to meet your requirements. The current is measured at the shunt just outside of the main battery fuse, so does measure total in and out current (apart from the tiny drain from the cell monitors).
In addition I also have a cell voltage monitoring system that will first alarm and then shut off charging sources when any cell hits a target voltage, currently set at 3.65. This happens quite frequently as at that point one of my cells (no. 3) is consistently a bit higher than the others.
I also have wind generation and occasional engine/alternator generation, both of which are switched of at a cell voltage of 3.6v and remain off for a timed period of 2 hours.
The net effect of this should be to almost charge the cells (a few missing percent is of no concern to me), while avoiding the risk of overcharging.
We have the normal draws on the battery – fridge, lights, computers, navigation and autohelm etc.
With all of that we cycle down to, at most about 80% SOC overnight. Often much higher if the wind is blowing in the anchorage.
All has been working well, but gradually the 13year old solar panels seemed to be less effective and on many days we were not getting up to fully charge. So last year we added some more panels. Now we are at fully charged by lunchtime.
Since we now have all the excess power, we would like to add some electric cooking – eg an electric kettle and maybe an induction plate.
But, here is the question. When I draw 100 amp (eg with the windlass) the voltage drops right down, maybe to 11.4v = 2.85v per cell. It recovers immediately, of course, when I turn it off. But if I run, say a heat gun, for a few minutes, the voltage drop sets off all the low voltage alarms. And then when the windlass stopped, the backflow was enough to reset all the navigation instruments, so I moved them over to be supplied by the SLA start battery that is downstream (via a diode splitter) from the LFP house pack.
So, am I able to do high current draws like this? The spec sheets say the optimal discharge current is 150A and for short periods I can go way higher than that. But how do I do that if it is going to trigger the low voltage alarms and disconnects? Does it matter if the voltage drops far down while the current is actually flowing?
My initial thought was to increase the number of cells, but your articles suggested to me that that is perhaps not the best solution.
So, any thoughts and suggestions on my setup and how I might run a kettle or induction plate?
Hello Noel,
Your situation is typical of what happens when cells are kept at a high state of charge throughout their life. The fact that you cycle at most about 20% of the total capacity clearly indicates that the battery bank is far too big for the application. You also have no energy management ensuring that the cells are able to cycle meaningfully before being recharged.
Aging cells see their internal resistance increase and this means that their ability to supply large currents without undue voltage drop reduces over time. Unfortunately, the only answer now is replacing the cells or confining them to a low-current application, because the electrochemical damage is unrecoverable.
The workarounds you describe make the overall situation worse. Electronics should not be connected to the engine start battery because of the violent inductive kick-back from the solenoid and starter motor.
Windlasses must be connected all the way to the battery bank using dedicated wiring, so the transients can be absorbed by the battery without shaking up the entire electrical installation. Furthermore, the battery needs to be in a good condition, with low internal resistance, to be able to fulfill that role.
Operating a lithium bank without any cell balancing circuitry is also generally unrealistic and leads to the issues you describe. It is a question of luck in initially obtaining cells with extremely well-matched self-discharge rates. In the end, there is no substitute for a correctly planned and constructed installation if you are after a long life. The bank installed on Nordkyn is nearly 8 years old now. It is made of 4 black Sinopoly cells and those weren’t the best in terms of aging. Yet it can still power an electric kettle or even a 1600W heat gun. The voltage does sag more now, but without causing anything to trip or reset. Capacity? 100Ah. With lithium, the answer is in energy generation capability, not storage. More storage generally equates to higher costs for a shorter life.
A small electric kettle (600-800W) is the best way of making use of renewable energy in the galley. Most of the LPG used by the stove is related to boiling water. Cooking itself doesn’t represent a lot in comparison, but an induction plate can be an option if the extra space is available. A bread maker can be a very useful addition.
Kind regards,
Eric
So i replaced the button panel as this was the cheapest option of the two componants to replace – still didn’t sort it.
Replace the MDI is next on the list then.
the problems arise after the boats been running for a while – i sailed for about 2 hours then when i started the engine to assist with anchoring the engine kept trying to cut out (my momentary starter backup worked a treat)
Couldn’t start the engine again through the button panel after this incident.
even with relocation of the MDI i think the heat is still getting to my tempermental one. i would consider trying to increase the length of the loom more and relocating the MDI away from the engine further – currently there just isn’t enough length to get it out of the engine bay. This would mean bastardising the loom more than i am willing.
Hopefully the precautions i have made so far (MDI Relocate) will keep my replacement MDI alive once i order it.
If that one goes pop i will have no option but to chin the volvo penta system off and install my own.
A very interesting report and I thank your for making it available.
My interest in Memory Effects is to understand how to properly manage LiFePO4 cells in stationary off-grid home power system, specifically I am concerned with partial (incomplete) charge and discharge cycles during winter months where Solar inputs fall (well) short of battery capacity. From your article I suspect a periodic deliberate manual complete discharge followed by utility or back-up generator recharging to fully-charged (as you define it) would provide a means to remove the memory effects of the battery bank and extend battery life/capacity over the long term. It appears to me this manual deep discharge and recharge “reset-cycling” (my own term) would be only be required semi-annually to ensure resetting the battery bank and prolong the health and capacity of the battery bank on a whole. Your commentary would be appreciated.
Robert Little
Robert,
Thank you for writing. Please note that the best way of not having to deal with memory effects is not to write memory cycles into the cells in the first place. As explained in the article, writing a memory cycle requires very specific conditions to be met: 1/ an incomplete charge cycle followed by 2/ a rest period without discharge. Off-grid systems tend to be powering loads more or less all the time, so avoiding a rest period following a partial charge is normally easy to achieve simply by configuring the charging process correctly.
The people who ran into serious issues with memory effects commonly used misconfigured charging systems with weak absorption voltages and excessive “float” voltages, thus systematically charging poorly and then preventing the battery from discharging for some time after that.
Deep discharge doesn’t really help with erasing cell memory. The memory survives deep discharge, it is the recharging phase that can erase it and the more ingrained the cell memory has become, the harder it is to erase it successfully, because the cell voltage rises abnormally early.
Kind regards,
Eric
Hi Eric,
Many thanks for the great education. I have just taken ownership of a new boat with a D2-40F engine. The MDI on the engine is W1908 23195776.
The engine has 13.9 hrs on it at delivery. I powered on the control panel and started the engine no problem, let it run for a few minutes and stopped it. The control panel wouldn’t immediately power off so I thought it may have been on a timer. I managed to power it off after about 1 min. The next day I started the engine again no problem. On stopping the engine, now I can’t power off the panel at all. The LCD constantly shows 13.9 hrs. The stop button works and shows ‘stop’ in the LCD, and the alarm / dim button also works, but neither the start button or the power on/off button functions.
Luckily I have been testing out the boat systems at the dock (also on shore power) and I know that the warranty will kick in, but I’d like to get your thoughts on what the problem could be. Reading through all the great posts I’ll probably invest in a spare MDI / Control panel as well as have jumper cables at the ready, as I’ll be coastal sailing short handed and can’t afford to be in a situation of having these types of problems when out on the water.
Thanks again in advance for any insights you may have as to the root cause of my problem!
Bill
Bill,
Sometimes moisture gets into the small control panel when it is installed outside (not the best idea) and it interferes with the operation of the four buttons. Take it off and put it a warm dry place for some time and see if it helps.
This kind of issue seldom has anything to do with the MDI module and I would never consider buying a spare. You can always start the engine using a simple workaround if this was ever needed. The vast majority of MDI modules never give any trouble anyway.
Kind regards,
Eric
Thanks Eric,
Much appreciated. I’ll give this try
Bill
Dear Eric,
first of all thank you and all the other contributors to this great source of information regarding troubles with the MDI box.
I have a D2-40 engine from 2018 which has been running now for about 420 hours. The MDI box worked perfectly fine until this spring, when I observed the following: After several hours of engine running, I could not stop the engine from the panel. Also, once I had stopped the engine with the stop lever, I could not reliably start the engine again. After shutting down the whole electric system of the boat (Bavaria Cruiser 41 from 2018) I could start again. This happened not always, but a few times, as mentioned after long engine hours.
Back in the harbor, the issues could not be reproduced (maybe because the engine had cooled down) so there was no chance to show this erratic behaviour to a Volvo technician, which was anyway difficult to find in Sicily.
Based on the information in this forum, I have done the following so far:
1. Build a cover for the control panel, to avoid that moisture enters the contacts of the panel in case of rain. I have not replaced the panel so far, nor taken it apart.
2. Removed the two electronic plugs from their sockets on the MDI to see whether there are any bad contacts. Nothing could be seen. MDI worked fine after reassembly but I could not test it after several hours of engine running. The contacts for Battery, Start and Preheat also looked fine.
3. Buying a spare MDI for about 700 Euros, just in case.
I am now considering to install in parallel a mechanical Bosch preheat-start-switch (cf. https://www.amazon.de/dp/B003NDTN18/ref=pe_27091401_487024491_TE_item ) to be able to start the engine in case the MDI box fails completely also after a restart of the electric system of the boat. I do not like to fiddle around with a screwdriver or jumper cable for preheating and starting the engine, when me and my wife are in a situation, where we quickly need the engine up and running.
My questions to you (and all the other experts here):
Should I proactively replace the MDI box now?
Is it a good idea to connect the manual Bosch switch for preheating and starting or do I run the risk to finally kill the electronics of the old MDI and potentially the new one with such a parallel installation.
I am very grateful for any feedback.
beat regards
Hans
Hans,
It is a puzzling behaviour because you were able to reset it by powering down and back up, even though the MDI box was still at the same temperature. If I was in your situation, I would relocate the MDI module away from the engine block, so it doesn’t heat up as much and see if the problem still occurs.
Problems with the control buttons usually arise from moisture ingress in the panel, which cause corrupted signals at the MDI module. There isn’t much of a case to replace the MDI module itself.
Kind regards,
Eric
Dear Eric,
thank you very much for your advice. I will see, whether I find an easy way to relocate the MDI module and postpone its replacement for the time being.
Regarding the erratic behaviour of the module, it seems to me (not an expert in circuit design) that some bad contact within the MDI (maybe caused by temperature and/or vibrations or simply age) could bring the controller into an undefined state, which is then reset by powering down (like my Windows PC or the like).
If possible, I would be very grateful for an additional comment regarding my backup plan of the parallel switch and the involved risks for my MDI module (or its costly replacement)
best regards and thanks again
Hans
Hans,
If the controller crashed, then the display would go blank and the gauges would also stop working. A problem with the control panel or the signals from it usually renders the buttons unresponsive because the MDI module doesn’t allow more than one button to be pressed at any one time. The fact that you can reset it by cycling the power is the odd element in your case.
Bypassing the MDI module and switching the solenoid and glow plugs “over” the MDI module produces the same effects as when the module does it. The glow plugs are almost entirely resistive and switching is quite smooth. The starter motor solenoid is something else, a voltage spike is produced each time it is turned off. The MDI module is exposed to it either way.
Kind regards,
Eric
Dear Eric,
two weeks of sailing without any further problems of the MDI module seem to confirm the humidity theory of the panel. On my Bavaria 41 the panel is outside and barely protected. After the first difficulties in April I built a cover for the panel to avoid its exposure to the rain. In June the problems were significantly less and now they are entirely gone. The panel and the MDI worked perfectly fine the last two weeks without any changes to the MDI or anything else.
Based on this experience I can only recommend to reliably protect the panel against the rain – apart from all the other meaningful modifications such as relocating the MDI and providing a backup switch, which are still on my agenda.
best regards and thanks again for all the helpful feedback
Hans
Eric,
Do you have any writing speaking to the cost of construction of such a boat if in Poland or Thailand or other budget location? I think somewhere you mentioned 300K but I was unclear what that number referred to. (just hull?)
Allen,
I think this sort of thing might have been discussed about the launch Wild South, not Nordkyn. Nordkyn had about US$200K in materials in it. A yard in these countries would be best placed to give you an estimate of labour, given the length and displacement.
I discussed costs in some more details here: https://nordkyndesign.com/the-cost-of-yacht-building/
Kind regards,
Eric
I have read all of your posts – excellent. One thing you don’t discuss a lot is balancing between batteries in a parallel battery bank. I know the recommendation is bus bars with equal length wires so that all paralleled batteries have exact same charge/discharge resistance and voltages. But it seems like that ideal perfect scenario may not always be reached on boats – where a lot of non-ideal compromises are involved.
I’m using diagonal parallel wiring, which should be pretty balanced, but battery 1 (of 4) still delivers more discharge current and gets charged to full slightly before the other 3. They’re 4 x 100 Ah 12v Kilovault’s. The charge recommendation is 14.1v for only 2 minutes or 2a tail current per battery (8a total for me). The probability of all batteries hitting exactly 14.1 and 2a tail at precisely the same time (or within 2 minutes) seems to be quite improbable so far.
In that case, what would you recommend? I can terminate charging as soon as the parallel bank hits 14.1 for 2 minutes, but batteries 2 thru 4 are still accepting 8 to 15a each. Battery 1 is accepting only 1-2a. So if I terminate then it ensures battery 1 doesn’t get overcharged, but in the long run I’m worried the other batteries may not get top balanced since they’re getting slightly undercharged (to like 99.5% SOC instead of 100%). Maybe I should continue at 14.1 for 20-30 min even though the manufacturer recommendation is ideally 2 – 6 min?
Patrick,
This is because the focus of this series of articles is on building battery banks from cells, not from packaged batteries like you have done, but your point is interesting nevertheless and I precisely intend to discuss in more detail the “parallel strings” configuration in the other article about assembling battery banks.
Parallel strings is an idea that sounds great in terms of redundancy and safety, but it also comes with more issues than one may expect, as you have discovered. This is because each battery string is an entity with its own performance and ageing characteristics and this means that a common charging strategy can’t work optimally across multiple strings. When charging at high currents in particular, differences of a few milliohms in the interconnects or cell internal resistances are enough to imbalance the charging currents and completely upset the time to charge termination.
Termination still needs to occur correctly and so each battery should be individually disconnected from the charging sources as it reaches “full”. In such a “parallel strings” configuration, there is one BMS per string and this BMS should be entitled to terminate the charge…
When you drop packaged batteries in an installation and wire them in parallel for more capacity, you are trying to simplify the situation and largely ignore battery management, but it creates its own set of issues. Charge termination is not the only one of them, it also creates more complex failure modes with potential cascaded failures that largely negate the “high reliability” argument.
Kind regards,
Eric
I have just come across this and find it very interesting having read many accounts of different strategies from Slocum, Voss, to Moitessier etc. In your reply above are you basically just saying pinched sterns cannot plane and when being driven too fast instead shift shift their CoR forward in trying to plane from a position further forward. Whereas a hull design with a sharp transom begins to plane without any changes in CoR?
And following that, surely then there is the risk ones on a plane that the boat will plough into the trough too fast and pitchpole? Should there not be some balance between outrunning them and running into the trough too fast, or are you refering to very very large wave periods?
Surely in short wave periods where the troughs can burry the bow would running with following seas be a bad idea no matter the hull design?
Ned,
Any stern that has high curvature or steep buttocks lines will eventually suffer from flow separation as speed increases. The corresponding and sudden pressure loss means that the hydrodynamic resistance moves forward at that point. It is also important to understand that it is of course the underwater part of the stern that matters. Even a double-ender could have relatively flat and straight lines aft, if the design is light in particular. Conversely, many transom hulls have atrocious hull lines, because the buttocks are deep very far aft and then rise too quickly. The flow must be able to leave the hull in a near-straight line close to parallel to the surface.
In a typical following sea in heavy weather, the waves are well developed and near-invariably travel faster than the boat. When an overly steep wave chases the stern, the boat must be able to accelerate, but it only keeps up with the crest momentarily until is flattens out, it doesn’t outrun it. The power required to do so isn’t there naturally. As a result, hulls don’t plow into the troughs, but they can plow into a secondary crest in the trough in some circumstances. This is where sufficient freeboard and volume forward become important safety factors with correct handling and strategic choices from the crew.
This must not be confused with the situation where the stern is lifted so high that the bow engages into the sea, or the whole boat is picked up by the breaking crest and thrown forward with various unhealthy results. This results from a lack of acceleration and speed to keep the hull out of the steep wave slope.
In the developing stages of a gale, waves can be both steep and short, but this means they are also slow. Fast boats can sometimes find themselves stuck in a trough, travelling at the speed of the sea and unable to exceed it. This happened to me with Nordkyn doing 14 knots running in 40 knots of wind south of Stewart Island (NZ) and I had to reef further because I was driving the bow into the back of the wave ahead of me while being pushed by the front of the one following me. Travelling in the trough at the speed of the sea was both safe and comfortable. I later mentioned this to a friend who is a commercial fisherman in the area and, in these conditions, they also have to throttle back with their large semi-planing vessel, because they are unable to overcome the wave in front of them in spite of having 1300HP available.
Outrunning the crests and climbing the back of the wave in front can happen, but it is uncommon. Firstly, the wave period T must be relatively short (because the velocity of the wave is V = 3 x T, V in knots, T in seconds) and the waves must be relatively low and well-formed. Secondly, the crew needs to drive the boat like a bat out of hell to succeed in sailing uphill at high speeds. I did this once before a big SW heading up the East coast of the South Island (NZ). Hovering around 14.5 knots, I was able to catch up with the crest in front of me and plunge on the other side, which is quite exhilarating. It can come with its own set of risks and it is an acute matter of judgement of course. Breaching a crest on the verge of collapsing can cause the boat to fall off it and possibly pitchpole. There is a fine balance between the length of the boat and the size of the sea.
In conclusion, running before the sea with a hull that is hydrodynamically good shouldn’t prove to be much of an issue, but controlling its speed can be important. While some ultra-light racers may go too fast even with no sail in extreme winds and run into trouble due to design issues such as a lack of buoyancy forward, the common problem for cruising yachts is becoming unmanageable because they are in fact unable to go fast enough. For these, the speed causes the problems, but the root cause is in the shape of the hull and slowing down doesn’t actually lead to a solution.
Kind regards,
Eric
Hi Eric.
I have a pair of year 2021 D2-50s. Both engines ran perfectly for 320 hours or so, but unfortunately, I just experienced my first MDI failure. A few seconds after starting the engine normally, the tach alarm sounded (with exclamation-in-triangle icon), and I picked up a strong smell in the engine compartment… similar to, but not quite like burning plastic. Fortunately, only the preheat function seems to have failed. Engine start/stop and instruments are still working normally.
The alarm now sounds after each cold engine start (when preheat is automatically energized for 20 secs), or if I intentionally activate preheat prior to starting. I have confirmed there is no power at the preheat terminal when starting and/or preheating. I opened up the MDI (part 23195776), and given the smell noticed when the first alarm occurred, I expected to find some obviously fried components. Surprisingly I didn’t find any, but suspect one or more of the FETs must have died. I will email you a few photos in case there’s anything different or interesting in this MDI box.
My question is, do you think this likely a case of plain bad luck (bad MDI), or should I be looking for some other cause?
Thanks!
Jeff,
The two transistors on the upper right quadrant of the board are in series and switch the glow plugs. I think you will find one of them them gone open-circuit from your description of the symptoms. They are Infineon IPB011N04L and available here for example: https://www.digikey.com/en/products/detail/infineon-technologies/IPB011N04LGATMA1/2080876.
I have seen these transistors failing in short-circuit and burning out, but an open-circuit failure is unusual. The puzzling part is the smell: something must have overheated somewhere! On your photo, the outer MOSFET doesn’t appear well seated on the PCB, it is soldered, but there is a gap underneath its metal tab. This is a manufacturing defect. This could hinder heat transfer into the PCB and potentially cause a failure.
If I was in your situation, I would check and replace the failed transistor on the board. It can be done using a heat gun on its low setting and a lot of care, heating the area until the solder melts and no more (at 183degC typically) and the parts can then be lifted off with tweezers. The process is known as reflow and there are a lot of videos around showing it. It is a good idea to shield the rest of the board using aluminium foil.
Kind regards,
Eric
Thanks Eric. We’ll get a replacement MDI (should be under warranty), and then see if we can repair the failed one as you suggested. I take it that there’s nothing about how this one failed that points to some other electrical issue that we should be searching for?
Hi Eric, amazing thread you keep updated here! Very good! Well done!
I am also with issues, that I believe are from the MDI box. The symptoms are somehow random but I am usually can observe this:
– after turning the battery switch “On” and going to the panel and pressing the “On” button it shows the message “Volvo Penta” for brief instants before switching it off… it does not progress to the the usual engine hours display; This only happens once, meaning that until I switch off and on again the battery switch I don’t ever see again the welcome message or any other information. No button does anything.
– If I start the engine on the solenoid with the screw driver (which I tried maybe 3 or 4 times), it starts ok and I can sometimes switch off the engine on the panel, sometimes I need to go to the off switch at the engine.
– Once after switching off at the off switch in the engine itself, the engine restarted by itself after few seconds.
– I once saw after a few hours not touching anything, having left the the battery switch “on”, the panel showing the engine hours. Still, no button seem to do anything.
I measured the battery voltage and is 12.7V~12.8V. The last time I started the engine before the failure was with the shore power connected. I can see that with the shore power connected, the voltage measured there is well above, close or even higher than 14V. Could that have damaged the MDI? Is that a wrong practice? It was my willingness to run the engine for some time, after some weeks without usage (the manual says to run the engine every two weeks for few minutes).
Any advice?
I have the part number 23195776, from week W1940. I opened up the MDI and looked inside and there is nothing I can spot from visual inspection (but I am not an electronics expert). Pictures in the URL. Engine is the D2-60 from 2020.
I am new at these topics (recent boat owner), so sorry if something is not clear or incorrect.
Thanks in advance for your support,
Gustavo
Gustavo,
Please note that all the issues you are describing could be explained by a malfunctioning control panel. This is a known failure mode with these Volvo EVC systems, when moisture gets inside the control panel. As a result, it is the most likely root cause.
Try removing the control panel and re-drying it by placing it in a warm location for some time. A few hours at 50degC in an oven for example could be one option. If your control panel is mounted outside, then move it inside the boat.
The battery voltage has no effect and it doesn’t matter how long the engine has been sitting. The recommendation to run engines from time to time relates to circulating the oil and prevent corrosion.
Kind regards,
Eric
Ferro Cement?
Do you think ultrasonic antifouling is likely to be effective on a ferro cement yacht?
Thank you,
Paul
Paul,
I think it could take twice as many transducers to get some kind of result because of the higher damping factor and I wouldn’t recommend it. It would also depend quite a bit on the thickness of the hull and the details and quality of the construction.
It would be interesting as an experiment for sure.
Kind regards,
Eric
Hi Eric,
Would like to add my 2-cents here. After 12 years of flawless service this happened: when I connected the start battery after a winter on land: the engine fired immediately up and the start motor kept activating. As if one would keep pushing the “on” and the “start” buttons. I could not switch off the engine with the EVC “stop” button untill I switched off the battery key. So I cut the cable to the starter. This allowed me to start the engine by shorting the cable. I then also found out the pre-heating was on all the time as if one would keep pushing the button on the EVC. The wire was really hot. This all must have killed the MDI. I ordered a new MDI, but I suspect the MDI was not the culprit here. I think moisture must have gotten inside the EVC, causing the on, start and pre-heating buttons to short-circuit. The EVC on the Dufour 375 is mounted straight on the bulkhead in front of the rudder, unprotected from the rain. I plan to make a kind of recessed box in the bulkhead to put the controls in a dry spot. For now I let the EVC dry under a self-made temporary roof.. What is your opinion?
Btw: the VRC-200 is still doing a fine job.
Kind Regards,
Danny
Daniel,
Moisture ingress in the EVC control panel is a well-known problem causing erratic operation. The panel is not weatherproof enough and must be installed out of the weather, preferably inside the boat. It is only a matter of time before water gets into it. It is usually possible to re-dry it by baking it at low temperature (~50degC) for a few hours in an oven.
Pressing any of the buttons on the EVC panel cause the circuit from the MDI module to be closed to ground. When water gets inside, it causes a short circuit to ground.
Disconnecting the battery while the engine is cranking creates a catastrophic event for the MDI module, exposing it to a huge negative voltage spike. At a minimum, it takes out the MOSFET transistors switching the preheat and starter motor solenoid, if it doesn’t destroy all of the electronics.
Kind regards,
Eric
Could you please show the math for determining the termination current based on cell voltage?
Russell,
Using:
V_abs_m = cell manufacturer’s absorption voltage (usually 3.65V)
I_term_m = cell manufacturer’s termination current (0.033C to 0.05C typically, or use it expressed in amps alternatively)
V_abs = actual absorption voltage (valid values are greater or equal to 3.37V)
I_term = actual termination current
We can write:
I_term = I_term_m * (V_abs – 3.37) / (V_abs_m – 3.37)
Much appreciated.
Thanks!
If I understand correctly the conceptual linchpin is the full resiting voltage of an LFP cell being 3.37VDC.
How did you determine this value?
Is it universal across LFP cells?
It is specific to the LiFePO4 chemistry.
Dear Mr Bretscher,
Thank you for your excellent analysis. Was omission of strategies employing a sea anchor intentional?
Patrick,
Yes. Sea anchors can prevent drift, but have no role in heavy weather. If the weather is truly bad – which means that the sea state is dangerous – sooner or later the sea anchor will be required to pull the boat through the vertical face of a wave advancing at 15 to 30+ knots. This is not going to happen: something has to fail because the forces at play are unmanageable. The boat then ends up lying ahull in a breaking sea, the absolute worst position to be in.
I only ever met one person who actually deployed a sea anchor in a truly heavy sea, the boat was a Cavalier 32 out of South Africa. It initially helped with keeping the bow into the sea. The warp parted before long and then the boat was rolled and dismasted almost immediately. It made landfall in Australia under a jury rig many weeks later.
It is a stupid strategy, because it is akin to driving at speed down a dead-end street with no brakes. Once you have thrown this over the side, you can’t retrieve it and the crash is unavoidable.
There was a time when yachts were simply unable to sail either upwind or downwind past a point because of their design and construction and became completely unmanageable in heavy weather. People understandably looked for any possible way to stop them from lying exposed beam-on in the sea. Today’s reality is that a yacht that can’t point in high winds has no place in a blow offshore, because it is dangerous by design. We see more and more boats made unsafe because their owners pile up ridiculous windage (and weight aloft) without a clue about the consequences this has on seakeeping.
Kind regards,
Eric
Incredibly useful!
Good day, thanks for sharing your knowledge on the Internet. I’m what you would call a DIY’er. I am interested in the hybrid solution to prevent blackouts. But most of the reading I do seems to say that chemistries should not be mixed. I understand your rationale for it. I would like to know if you or others have long term experience with such a setup.
Thanks!
Philippe,
The generic rule is indeed not to mix battery chemistries because of their different charging requirements. The extent to which the rule is applicable depends on the specific case.
In the case of LiFePO4 + Lead-Acid being charged as LiFePO4, the drawbacks go towards the lead-acid because it makes it more difficult to recharge properly if it gets discharged (the lithium will discharge first). Using a gel lead-acid battery, this is better mitigated as get batteries charge at lower voltages and don’t suffer from electrolyte stratification (sulphuric acid going to the bottom basically).
In terms of safety, a cell could fail somewhere and one battery would discharge into the other. This can always happen when batteries or cells are wired in parallel, even within a single chemistry. The voltage difference and battery resistance don’t allow currents to reach anywhere near short-circuit levels. The result could be somewhat unpleasant, especially if left unchecked, but here again it is not fundamentally different from what can happen with the same chemistry throughout.
A 4-cell LiFePO4 battery and a 6-cell lead-acid battery have characteristics that just allow considering building hybrid banks. These provide a degree of simplification in system design at the expense of somewhat sub-optimal charging of the lead-acid. Many have been built very successfully and have been in operation for many years. With drop-in lithium batteries, which a number of people want to use for the sake of simplicity, it happens to take care of most critical issues…
It is a matter of understanding the situation rather than trying to follow “rules”. These “hybrid banks” I described years ago break the rule, they are not what I recommend doing, but they remains feasible and they suits some situations.
Kind regards,
Eric
Thanks for your quick response! In the original article Alternative 1 you said: “SLAs are the best choice for this application as they don’t consume water and are very inexpensive; gel cells should be avoided as they are costly and a lot more intolerant to overcharging and AGMs would be a complete waste of money in this role.”
In your reply I’m understanding that you may have changed your mind and that you consider gel better now?
I’ll admit that in my case I’m not overly concerned by the cost of having to replace an SLA every few years. I’m more concerned with simplicity, reliability and weight.
Thanks again!
A gel cell is a type of SLA. The gel cell has slightly more favourable voltage characteristics and is not prone to electrolyte stratification, so it would be my preference in this type of service. I will update the article to reflect this.
Thanks and best regards,
Eric
A French firm Ciel-et Marine, produces (did produce at least 2022) both a radar warning device and a simple AIS warning device.. I bought the radar thingie, have not yet mounted it permanently but it seems to work when tested in port. Adjustable sensitivity, gives an indication of direction and covers both X band and S band
Thus I have no experience of how it works on the ocean, nor of how well it survives onboard.
http://ciel-et-marine.com/
It is definitely cheaper than a radar and also much cheaper than a Sea-Me Radar Target Enhancer but obviously not the same thing either.
With regards to the conditions to avoid:
1/ an incomplete charge cycle followed by
2/ a rest period without discharge
Is there an amount of, or rate of, or duration of discharge which is needed to avoid the memory write?
Eg, a BMS, or even a columb counter/volt meter will be placing a very minimal discharge on the cells. Is this enough to avoid the memory write event?
Rowan,
The goal of the discharge is to remove the particular distribution of the charge carriers left at the end of a partial charge cycle that leads to the memory effect. If you discharge too slowly and this distribution remains in place for too long, I would expect it to produce the undesired effect.
We know that this happens from practical experience: having a BMS or battery monitor has never stopped memory effect from occurring on an incorrectly managed battery bank.
Kind regards,
Eric
I was very interested to see your graph with the overcharge area on the bottom right. I’ve been under the impression that it was impossible to overcharge batteries if I stick to 4.2V for ternary lithium or 3.6V for LFP.
What degree of damage could I expect if I hold the battery charging at 3.6V for longer than the table stipulates? I rescued a decade-old, 7s, nominally 40Ah LFP battery that was destined for the landfill and I’m running it through some charge/discharge cycles. If I respect the 0.05C cutoff that means terminating charge at 2A, but cycling it that way I measured only 30Ah of cyclable capacity. However if I continue the absorption at 3.60V down to 0.2A (so 0.005C, or 10 times smaller tail amps), I get an additional 8Ah of charging capacity. Does this mean I’m damaging the battery, or would my case be an exception due to the battery’s age and presumably level of degradation excusing the longer absorption?
I also have two simple questions if I may. For manually charging a standalone battery with a CC/CV power supply and monitored against over-voltage with an active-balance BMS within the battery, what CV setting do you recommend – 3.5V or 3.6V?
And lastly, should the charge current be limited at very low states of charge (say <10%) or can 0.5C be sustained right away, starting from 0% charge (i.e. 2.65V/cell)?
Luke,
You will most definitely overcharge the battery if you hold the voltage up past the termination point. What happens is that all the free lithium gets displaced and the current drops down to zero. Once the cathode can’t absorb any more Li+ ions, they start plating what they can inside the cells and the result is irreversible.
The termination voltage and current varies between cells, but it is usually in the range of 0.02-0.05C for prismatic cells at least. Your cells could be different, the only way to know would be getting the specification from the cell manufacturer. In my experience, the cells develop higher internal resistance as they age, but the charge termination condition doesn’t change. I have a 9-year old LiFePO4 battery in service here. It has lost some capacity and the voltage sags more under load, but trying to charge it more forcefully achieves virtually nothing besides stressing it. I tested that a few years ago to see if I could somehow recover the lost capacity in case it was due to memory effect. It wasn’t.
I have never found any reason to charge LiFePO4 cells using more than 3.50V/cell in normal service. Unfortunately, if you use a BMS that won’t balance until the cell voltage is significantly higher, then it will allow cell imbalance to develop further before taking action and (usually) also fail to fully rebalance, but this is not automatically a significant operational issue and you can perform the occasional charge cycle (say once a year) up to a higher voltage at low current to fully rebalance the cells if desired. It is always better for the cells not to be exposed to unnecessarily high voltages as it causes them to age faster.
All the data I have seen indicates that the only situation where the nominal charge rate must be reduced is low temperature. Low temperature limits the rate of diffusion of the Li+ ions into the cathode and exceeding that rate also leads to lithium plating. The state of charge of the cell doesn’t matter.
Kind regards,
Eric
Hi Eric,
Many thanks for replying. I’m afraid that since this battery was recovered by the previous owner from a solar-powered buoy I don’t have a datasheet or any info to speak of, so I’m trying to discover the cell capabilities myself. I recently fitted a JK BMS with a 1 Amp active balancing, and I’ve sorted most of the settings but still playing with the balance start voltage. The default is 3V but I’m thinking to raise it to 3.4 or 3.5V so it won’t undo the top balance with each discharge cycle as one of the cells is much weaker than the rest (by about 5-10Ah on this 40Ah pack) so ends up at a lower voltage than the rest of the pack consistently.
Just to make sure I understand – if 0.05C @3.65V corresponds to a termination current of 2A, and I keep going to say 1A @3.65V (not zero amps) would it still have caused damage then – despite not continuing until current is zero? I take it then that if current flow is a result of lithium ion flow, could the current I’m seeing be caused by the ions forming the plating instead of intercalating into the cathode?
I’m a bit curious how far this can be pushed because it seems the 0.05C is an arbitrary value chosen to have some factor of safety. On healthy cells like my new 280Ah 4s pack, there’s not much to be gained pushing this number, but on my mystery 40Ah pack there’s an almost 25% increase in charge capacity by terminating at 0.005C instead of 0.05C. I’ve just finished doing that to manually top-balance the seven cells and it took 9 hours of absorbtion for each cell (using a hobby charger at 3.60V). Reading your comment now I see I might have ended up making things worse by letting the charge go on that long – but I will do an instrumented discharge test soon to see whether real capacity has increased or decreased. I’m doing this more to learn than out of a particular need to keep using this pack.
Some weeks ago I left the pack for 7 days at 2.000V per cell (using an external supply and keeping the BMS balancing the cells) because I read a paper than said this will recover some capacity in LFP cells that had been part-cycled all their life. Ultimately it didn’t improve their capacity nor did it reduce it so at least that’s one experiment done. Now trying other ideas (the extended absorbtion for perfect top-balance being one of them).
If you have any other ideas for recovering lost capacity I’m keen to hear them!
Luke,
The termination condition is not arbitrary, it is manufacturer-specified. If you don’t know what the cells are, then you won’t know what it is.
A 40Ah pack with a weak 30Ah cell is a 30Ah pack.
Balancing can only be done either at the top, or at the bottom. In practice, it is nearly always done at the top. You can’t start balancing until cell voltages begin to visibly diverge. This doesn’t happen below at least 3.4V/cell for LiFePO4 and more like 3.45V/cell.
Capacity loss from memory effect has nothing to do with part-cycling as such, it originates from incomplete charging followed by a period of rest. It makes cells harder and harder to recharge because the voltage rises to early during the charge cycle. I am not aware of low-voltage methods for recovery from memory effect. LiFePO4 cells should not be discharged below 2.5V/cell.
Lithium cells of unknown origin and with a dubious history can be dangerous. They can ignite quite unexpectedly, especially during charging.
Hi Eric,
I am supporting a Student at the Bundeswehr University in Munich. He is working on His doctoral thesis.
Can we use parts of your papers and comments, if we clearly identify the source?
Thank you for an answer,
Regards Hans
Read “The Commodore’s Story”, Ralph Munroe & Vince Gilpin, for first-hand accounts of the Presto class abilities. Available online at the Wayback Machine book repository at archive.org
Richard,
Thank you for sharing this, it looks exceedingly interesting! I followed your suggestion and found a PDF scan of the book at the following link: https://ia802500.us.archive.org/19/items/commodoresstory00munr/commodoresstory00munr.pdf
Not sure how permanent this will be, but it saves searching the archive if it works.
Kind regards,
Eric
Hello Eric,
Read al your articles with great interest. You did an outstanding job I must say. My compliments.
Presently in the process of installing LiFePo I yet have a question. I want to charge my LFP directly from the alternator in which the BMS regulates the voltage of the alternator via the sense wire.
In your articles you mention installing an isolator if you want to go for the split charging option which I prefer.
But why do you need an isolator ( like argofet)? If the LFP gets its charge from the alternator can I not connect a DC-DC directly between the LFP and my start battery?
That way the DC-DC takes the load in case the LFP shuts down so I won’t blow up my alternator.
Thanks and keep up the fantastic work.
Cheers
Frans
Hello Frans,
It is a very good question, because quite a few people believe they can connect an alternator directly to a DC/DC converter in one form or another. It is a bad idea for two reasons:
1/ Between the input and output of a DC/DC converter, you have at least one MOSFET transistor, one inductor and some copper traces. There is a limit to the current and voltage spike these elements can tolerate before failing catastrophically. If you disconnect the lithium battery under heavy load, all the inductive energy stored in the alternator stator windings will try to flow across the converter to the starting battery as the magnetic field collapses.
2/ Unless the converter was designed for alternator charging, it may malfunction because an alternator doesn’t produce smooth DC power. There is a lot of ripple noise that is only filtered when the alternator is connected directly to a battery. The battery acts like a large capacitor.
Using an isolator to create a path from the alternator to the starting battery ensures that a connection capable of handling the full current of the alternator at any time always exists. If you use a DC/DC converter, then it must be wired across battery banks, it can’t replace the isolator.
Another situation close to what you are describing is when people want to use some kind of “alternator to battery charger” instead of regulating the alternator. In this case the converter has to handle the full alternator current, it runs very hot during bulk charging and represents a major failure point in the system. This kind of solution primarily benefits the manufacturer and retailers…
Kind regards,
Eric
Hello Eric,
Thanks for your prompt reply.
My BMS handles the alternator current via the sense wire. I want to benefit from the fact that LiFePo can be charged at a high rate.
If I leave my argofet installed the starter battery won’t ever get fully charged due to the lower voltage requirements demanded by the LFP, hence my idea of putting a DC-DC in-between.
If I understand you correctly you are saying that in case all the current goes to the Victron DC-DC due to a LFP collapse or (relay) shutdown the Victron DC-DC will blow up.
So the best way to go if I get you right is put the DC-DC after the argofet, ie between the argofet and the start battery and feed the LFP from the other argofet connection? ( my argofet (victron) has alternator in and 2 battery connectors).
Thanks and best regards,
Frans
Hi Eric, excellent work with all these details.
I bought a 2014 D1-30F with a MDI from 2020.
With the first test I was not able to have the MDI work reliable. I could get the screen to start once. Than nothing and again after some 2 hours starting up the screen once.
While starting to remove the MDI to send it back to the supplier I noticed the MDI with metal casing was not tightly fixed to the motor. Also behind the MDI I noticed green paint reducing the contact of the casing to the motor.
After attaching the MDI now with a good connection to the motor i.e. the negative, the MDI hasn’t failed in the past 10 attempts.
Am I correct that the casing needs earthing or connection to the negative? I’ve not found anything on this in all the discussions above.
Arnold,
The only connection the MDI module has with the ground negative is through the 8-pin connector of the engine harness. The circuit boards inside the module are mounted onto the plastic base and the metal cover doesn’t appear electrically connected to anything. It becomes grounded when attached to the engine block, but this should not have any functional role.
What is more likely is that you have improved a poor connection by moving/removing/reinstalling the module.
Kind regards,
Eric
Hi Eric,
If my understanding is correct, the only remaining issue with a LiFePo4 bank charged via Victron SmartSolar MPPT chargers used in combination with a Victron SmartShunt that propagates charge current irrespective of loads to the MPPT charge controllers, is that these controllers only allow a fixed absorption voltage and tail current (which could be set to match the table you have provided), and so if the solar output reduces such that the charger sits at a voltage below the specified absorption voltage for a significant period of time, it will eventually overcharge the bank with no termination. I suppose setting the absorption voltage to 3.370V/cell would avoid this in theory, but would likely result in impractically slow charging. Do I understand that correctly? Would a sufficient mitigation be to ensure that the solar panel output voltage is consistently significantly higher than the bank voltage, by e.g. wiring more panels in series, such that the MPPT controller is consistently able to achieve the specified absorption voltage and able to terminate charging based on the appropriate tail current?
Many thanks, and thank you very much for the detailed information!
Best,
Alwin
PS: We are really really pleased with the performance of your ultrasonic antifouling system. It has worked a treat, even on the parts of our hull where our antifouling paint has come off completely and we are down to bare aluminium. No hard growth in sight one season in.
Hello Alwin,
Solar panel voltage increases very quickly with illumination, so finding enough voltage is never a problem. The situation where overcharging can take place is when the charging current is very low due to low light levels. It is primarily an issue when the battery is far too large in relation with the capacity of the solar array. There is not a lot you can do about this unless the BMS helps you by providing a charge termination signal using an improved algorithm. In these situations, the battery will reach a higher state of charge at termination with very low current.
I have sometimes thought about creating a small module to provide this function as many people use drop-in lithium batteries with integrated BMS which lack any kind of control capability, but this hasn’t had a very high priority.
Thank you for the feedback about the ultrasonic antifouling system. It is always very interesting to hear back from its users.
Kind regards,
Eric
Hi Eric,
Many thanks for the swift response. You are right about the voltage of course. If I understand the Victron MPPT settings correctly, I think that the tail current setting would effectively misinterpret low solar charging output as the termination current having been reached. In that case this would lead to under- rather than over-charging, if my understanding is correct, which seems like less big of a deal (especially for smaller banks, where this corresponds to less “wasted energy” overall). Did I get that right?
Best,
Alwin
Hello Alwin,
The standard CC-CV charging algorithm assumes that current is always available up to a limit (CC) and terminates the charge at constant voltage (CV), so at the end the current tapers down while the voltage is steady at the absorption level. This is not automatically true with solar. For the termination to occur, both the current (tail current) and the battery voltage conditions must still be met: at very low current, charging will continue until the voltage finally rises to the termination point (absorption setpoint) and it means that charging finishes at the prescribed voltage indeed, but with a much lower residual current than intended. This does result in a degree of overcharging as a result, if we define overcharging as exceeding the state of charge normally reached by charging under standard conditions.
One parameter to assess is the amount of current available under unfavourable conditions and then how often this can be expected to happen while the battery still charges fully. In your case (and mine), the ultrasonic antifouling system provides an always-on load, so this situation can arise only when the solar output is slightly above the average consumption. A lot of the time, the battery may not get recharged to full in these conditions because the day is not long enough.
Best regards,
Eric
I have a Presto 36, built in glass, in 1992, by Perfection Industries of Ft. Lauderdale, Florida.
Hello Nelms,
There have been quite a few boat designs “inspired” by the original Presto, the lines of which are in the public domain today. People appear to have altered the original lines for some reasons, so technically they are not Presto boats any more. Our knowledge of hull hydrodynamics has significantly increased in the past 50 years; there may be somewhat compelling reasons to “optimise” the hull shape. As I have never drawn the original Presto lines in CAD to analyse them, I can’t specifically comment in this direction. Any such changes prompted by hydrodynamic optimisation would target the longitudinal distribution of the volume as this is what determines the position of the centre of buoyancy (LCB) and the prismatic coefficient (Cp). These are the primary figures of importance for hydrodynamic performance. Changes to the shape of the main cross-section should be called arbitrary in comparison, they would impact the stability and essentially depart from the essence of the original design.
The other aspects that changed over time are materials and construction methods. A hull built today would almost invariably be lighter than the original and allow a higher ballast ratio / lower centre of gravity. It is good for safety and sail carrying ability, but it can change the motion of the vessel in a seaway. This could be compensated advantageously by using a somewhat taller rig, balancing the added stability with a greater sail area.
A good yacht design is a fine balance between many parameters and it appears to have been achieved in a truly remarkable way at the time by Commodore Munro. Once changes are introduced, the design needs to be rebalanced differently overall and the outcome simply becomes a different boat.
Kind regards,
Eric
Thank you! Thank you! Your well written and very informative article saved me, who knows how much time and money troubleshooting and parts replacement.
My MDI box (w1831) stopped exciting the alternator, all other functions work.
Thank you again for taking the mystery out of the black box.
HI Eric,
Have you found a BMS that does “Charge Under Termination Current Protection”, or even better allows for dynamically setting the charge voltage when charge current is below the termination current?
Ceriel,
I can’t really answer that question because I use my own custom-built BMS. Controlling the charging parameters from the BMS requires integration between the BMS and the charge controllers. It is generally not essential when the objective is simply to recharge the battery and the battery is large in relation to the charging current (i.e. the charge rate cannot be excessive) and the charging conditions are “normal”.
If you want to charge at colder temperatures, a lot of current is potentially available etc, then being able to dynamically set current limits becomes of interest. The issue quickly becomes complex because you may have to assign current limits across different independent charging systems operating in parallel to respect a maximum charge rate.
There are no standardised communication protocols for use by BMS modules at the moment and this is a serious obstacle to integration. What is done within proprietary solutions where such communication exists is often rather unimpressive as the focus tends to be on maximising performance and reserve capacity, which in turn minimises battery life expectancy under many real-world use situations.
Kind regards,
Eric
Hi Eric,
New cell types like Eve MB31 and Rept CB75 have not longer a 0.05C termination current listed in their datasheets. Instead the manufacturers stop “standard charge” when 0.5P charging reaches 3.65 Volts: that is already at 137 amps for an MB31. Which voltage versus charge rate termination table applies to these newer cells?
Ceriel,
Yes. It is a fast charge test specification (no absorption) associated with achieving the stated capacity. It is driven by the fact that these cells are intended for EV use, where they are required to operate at large currents and fast recharging is part of the scope of requirements. It doesn’t mean a full cell from an electrochemical point of view. The specification also indicates that the maximum allowable SoC is 113% of nominal, which requires charging more slowly and/or absorbing at the end. Past this point, the cell would rapidly run out of free lithium, current would go down towards zero and the apparent resistance would rise very rapidly, which is exactly the situation to be avoided when charging lithium battery cells.
The best pathway is to conduct an experiment with a combination of termination voltage and residual current to see what kind of effective capacity it achieves and make adjustments from there. In the end, it strictly doesn’t matter how you charge the cell as long as you don’t exceed its limits. Once apparent resistance begins the rise quickly, it is time to stop and it is essential to do so.
Kind regards,
Eric
Eric,
Thanks for pointing me to SoC < 113% of nominal. I read over that part.
Before conducting experiments I need more information. How to measure the "apparent resistance"? I guess it's not 1kHz AC-IR that can be measured using an YR1035+.
How much charging power should there at least be to run an experiment at absorption = 3.425V? 10% of 354,8Ah = 36 Amps at 3.425V = at least 123 watts?
To run the experiment at 3.65V would require 50% of 354,8 = 175 Amps (at 3.65V = 639W)
My Picotest can only supply 5 Amps. Looks like I need some kind of expensive GW Instek PSU 8-180 DC lab power supply with OVP. Or is there a less expensive alternative to run this experiment?
Ceriel,
The apparent resistance of a cell during absorption is its ability to accept current at a given voltage: R = U / I. As you keep charging a cell at constant voltage, the current drops and will eventually reach zero if you don’t stop earlier, so the resistance appears to become infinite at the chosen absorption voltage. It is due to the fact that the cell runs out of free lithium ions. If you reverse the current and discharge, the resistance will be extremely low, so it is not the same as the impedance of the cell as measured in a lab. The real reason is that as the potential of the electrochemical cell rises with the state of charge, more voltage would be required to maintain current flow; the actual impedance stays very low.
You only need a power supply able to provide more than the typical residual current at the end of the charge (say 0.05C) and a calibrated battery monitor to demonstrate what happens.
Kind regards,
Eric
Eric,
Which voltage?
354.8Ah at 0.05C that makes a power supply of 17.74 amps at least. Let’s take a 50 amps supply. The next hurdle is that the manufacturer doesn’t specify to terminate at 0.033 of 0.05C at 3.65V. At which voltage should I run the experiment? When correlating it to your table, and a guess for the 0.05C column, My guess would be 50/350=0.14C -> 3.450V, or just run the experiment at 3.65V?
When to stop the experiment?
Just an imaginary example: the apparent resistance when tapering down starts is f.e. 3.65V/50A=73mOhm. When tapering takes 90 minutes, after 40 minutes the current measures 12.5 amps, then the apparent resistance is 3.65V/12.5A=292milliOhm, after 60 minutes current measures 2.5 amps, results in an apparent resistance of 3.65V/2.5A=1.46Ohms. This is roughly the tipping point where the current-time curve starts to flatten: where a triangle that touches the curve in 1 point has 2 corners of each 45º. Is this what I am looking for in the experiment, at least to stop charging? Or can I continue more towards 90 minutes where current is 0.005C, thus apparent is like 3,65V/0,25A=14.6 Ohms.
Which information needed?
That tipping point, is that where to take the Ah and Wh values as real capacity and continue from there. Or do I need to take other information out of the “calibrated battery monitor”, and or from different points in time?
With kind regards,
Ceriel
Ceriel,
The manufacturer indicates that charging should not exceed 354.8Ah, so if you discharge a cell fully as per the specification and then charge 354.8Ah using Coulomb-counting, you reach the point where you can assess what the residual current is at the absorption voltage of your choice.
As you point out, 0.033C or 0.05C would still represent a substantial amount of current, which means that the cell still has a fair amount of free lithium available then. What really matters when charging lithium cells is not forcing the charging process, whether this comes from high voltage, low residual current or low temperature. There is no point trying to charge exactly to some ultra-precise target each time. Unlike lead-acid chemistry, the cells are incredibly easy to charge and there is no need to push the envelope.
Kind regards,
Eric
Hi Eric,
I am wondering how you chose to attach the windpilot lines to your tiller – based on the picture I see a small block tied on with a line going straight back to the windpilot, and I cannot understand how that would work.
I am asking because ours is connected by a piece of chain linking the two lines that hooks onto a small metal fitting bolted into the tiller, with a little cleat thing on one of the lines to let you adjust the slack. However, this system is proving quite tricky to adjust when the vane is actively steering and one wishes to compensate for e.g. increased weather helm, because one has to unhook the piece of chain from the tiller, and hand-steer while hooking in an alternative link, which in turn likes to jump out when not lashed down. Of course we could re-lead the lines to improve that latter aspect, but I have seen several people simply attach one cam-cleat on each side of the tiller, and bend the lines 90 degrees around the tiller and cleat it in. This should allow direct adjustment of each side independently with ease. What do you think of this setup?
Many thanks,
Alwin
Hello Alwin,
I have always used the stainless steel chain and tiller “pegs”. It sometimes take a little bit of strength to force the tiller over and re-attach the chain when “adding a link” one way or the other to balance out weather helm, but I have found it fast and reliable. It is important that the chain follows a near straight line across the cockpit when hooked onto the tiller and the turning blocks on each side must not be any higher than the tiller attachment point. I have never had to lash the chain, ever.
I use a type of plastic cleat designed for fenders to attach one end of the chain to the control line from the Windpilot with a loop, it sounds like you have the same. The cleat is not perfect as it tends to give back a little slack under load over time, but tying a half-hitch around the rope after the cleat fixes this and it makes it easy to disconnect the chain when not sailing. A different type of rope might behave better, mine is just plain 8mm polyester double braid.
I know about the system with small turning blocks and cleats/jammers on the tiller itself, but I have no experience with it. It requires two adjustments each time instead of one and I think it would be more difficult to make small corrections for weather helm without risking to lose the previous position. It could also become a two-handed job where I can currently lean against the tiller with my leg to push it over while adjusting the chain by a link or two with one hand only.
We generally get used to what we have and find ways to make it work. My setup was slightly better on my Arpège than now on Nordkyn and I have moved the turning blocks once already. I wouldn’t say that it is optimal and I have been thinking about moving the turning blocks again (to achieve a perfect straight line) and adding a quadrant to the top of the Windpilot arm so the control lines “roll off” and the length of the linkage stays the same at all times instead of tightening up at the top and slacking off slightly on each side as the pendulum operates.
Nordkyn requires more precise steering and has less weather helm than the Arpège. It can be completely neutral at the helm and then the tiller needs to be pulled both ways whereas the Arpège mainly relied on the windward steering line. Any slack in the tiller lines impacts steering performance much more noticeably now.
Kind regards,
Eric
You’ve put together a really useful and easy to read article. But it leaves me wondering what to do with it.
Lead likes to be overcharged, and held at absorption. And, as you point out, no chargers no when that expires, and the suffer from “premature floatulation” as MaineSail/Rod Collins calls it — dropping to float too early. LFP has the reverse — when you hit bulk/absorption voltage (say 14.0), you want to drop to float NOW — not in 20 minutes.
You described in great detail the issues with short-cycling and sustained high SOC. No/few BMS can handle that, but those issues are fairly easy (albeit annoying) to control manually — for instance I anticipate completely disconnecting all charge sources when laid up for the winter, and enabling them as needed when SOC gets too low.
The issue I’m struggling with after reading your article is “so what now.” Does anyone sell a BMS that implements an effective tail current vs voltage profile, and provides adequate degree of discharge before re-enabling? Lots of BMS (and even some alternator regulators) “know” the battery current, but the unknown is how many factor that into the charge profile. My BMS (Electrodacus), for instance, is 100% voltage controlled with zero current-based logic.
My intention, based on the level of effort/expense I’m willing to implement, is setting my inverter and shore power at absorption of 14 and float of 13. The alternator will be slightly less. The BMS will also cut all charge sources at 14 — well before the battery disconnect at 14.8 or so (spec sheet maximum of 15.2). This of course can subject the battery to 14V for some period of time (minutes/hours, not days/weeks).
I guess the question is, how harmful is hitting 14V for 1/2 hour per day (when in use and at least some use is occurring) and, if it is bad, how can it be managed in a real-world installation.
Harry,
There are many misconceptions in your message.
Lead-acid is more tolerant to overcharging, but it will get damaged too if this is systematic. Occasional and controlled overcharging is an accepted way of balancing (equalising) the cells. They must certainly not be held at absorption voltage indefinitely.
Lithium requires absorption too, unless charged at very low current, so the statement that the charger should drop to float immediately is incorrect. It needs to stop charging when the termination condition has been reached and this requires monitoring both the voltage and the current. If you have fast-charged a 4-cell battery up to 14.0V, it may well be able to stay in absorption for 30 minutes after that while the current tapers down. It certainly won’t if it has been charged at low current because it will be absorbed already.
You have two basic options for the winter. Both start with discharging the battery down to a low SoC: the lower the better. After that you can either 1/ disconnect everything or 2/ hold the system at a low voltage like 12.0V with a DC PSU. In the latter case, you can keep some loads on if you want. The PSU won’t be able to charge the battery.
I am aware of the implementation issue. I get around it with a custom BMS and of course this doesn’t help anyone else, but I have been thinking about designing a solution to help with this termination issue in general.
Kind regards,
Eric
A very interesting article. All curent systems use ultrasonics, presumably because we humans can’t hear that high and won’t be annoyed by a working system. Twenty + years ago, I built a low frequency system. At the time, there were no commercial systems available in the uk. Using a frequency below 50Hz, that was pulsed to be ‘on’ for one second and ‘off’ for five seconds in a continuous cycle, a timer circuit closed a relay for the ‘on’ period, which fed the audio signal to two 12 watt amplifier modules driving two exciter speakers positioned port and starboard. These were bonded to the inside of the hull as far from bulkheads as possible. The boat was on a mooring, so there was no other boat near. You simply switched the system off when on board.
Over 10 years of use, barnacle growth was reduced by around 80%, though strands of weed continued to grow especially on the waterline. The hull was easily washed with a pressure washer. The boat was a yacht, rather than a power boat, so didn’t sail fast enough to self clean. The optimum frequency was chosen by placing a microphone against the hull and varying the tone generator to the resonant frequency of the hull to give maximum output.
This is a really interesting contribution, thank you! Hard growth like shells can be 100% inhibited using ultrasonic energy and a piece of research (Guo, 2011) showed that best efficiency was achieved at the lowest tested frequency of 23kHz for common barnacles in the lab (but only 23kHz, 65kHz and 102kHz were used). It seems that the vibration disrupts the attachment of the larva and it makes sense for this to also work at sonic frequencies. The fact that you were able to use low-voltage audio equipment is clearly attractive; ultrasonic drivers need to produce fairly high voltages to deal with the small capacitance of the transducers.
The waterline is a known problem because of what appears to be a signal reflection at the boundary where the hull plate comes out of the water. It would be interesting to try and also place a transducer in the topsides to see if action from both sides of the waterline would lead to improvements.
Weed growth development is underpinned by different mechanisms and seems to require much higher frequencies. Not all weeds react to the same frequencies either and this tends to defeat fixed-frequency systems.
Kind regards,
Eric
Hello Eric
Do you consider that a twin keeled sailboat would be more or less likely to capsize in this situation, in comparison to a single keeler?
Hello Anthony,
Quite possibly, because twin keelers have appendages angled outwards. When the hull heels, the leeward keel first becomes vertical, increasing its projected lateral area and transverse drag as a result.
With a single keel, heel helps the hull slide laterally. This is what happens when you sail a keeler hard on the wind in a heavy breaking sea: the boat crosses the breaking crests using its forward momentum, but the breaking crests also push it sideways in the same time and it doesn’t resist as much because the keel is already angled away from vertical. The boat heels a bit more, gets covered by the crest sometimes, but comes out unscathed on the other side.
Kind regards,
Eric