Last Updated on 03 November 2023 by Eric Bretscher
This article deals with some of the physics involved when a yacht is running before the sea, especially in heavy weather when waves are long and their front faces become steep.
Yachts running in heavy weather and following seas face challenges that are very dependent on the characteristics of the design; the ability of the crew to fully control the situation can be much reduced and this is why understanding the dynamics of the situation becomes quite important in order to anticipate properly.
Driving Forces in Following Seas
One immediate point of distinction when running before the sea with any small to mid-size craft is the acceleration usually imparted by approaching waves. Not all boats accelerate the same, but a constant is that – provided the wave face is steep enough – all boats will try staying ahead of the crest. Some do so elegantly, and others very poorly.
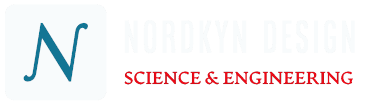
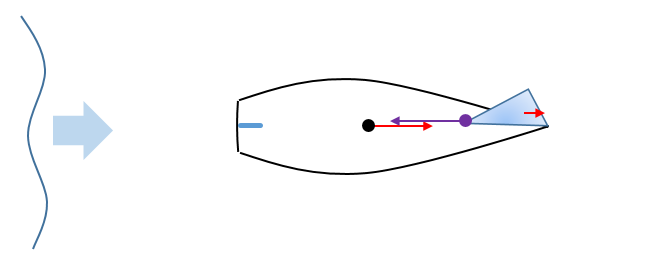
When a wave approaches a vessel from the stern, it is not so much that it pushes the hull forward – it doesn’t, but instead it simply creates a slope and the boat is carried down that slope by its own weight, like a cart rolling down a hill.
The red force is the driving component of the weight of the vessel. The steeper the wave, the greater it gets.
This contribution is surprisingly large when compared to sail driving forces. We can compute the approximate sail force from a jib of 14m² downwind in a 50-knot apparent wind as follow:
Wind speed v = 50 knots = 25.7 m/s
Air density ρ = 1.29 kg/m³
Sail area A = 14 m²
Approximate sail drag coefficient CD = 0.66
Driving force = 0.5 x CD x A x ρ x v² = 0.5 x 0.66 x 14 x 1.29 x 25.7² = 3936 Newtons
To get a feel for this, 3936 N is the force required to support a mass of 3936 / 9.81 = 401kg. In simple terms, the jib is pulling the equivalent of about 400kg (or 880lbs). The windage of the hull, mast and shrouds further adds to this.
Now, if the wave slope is a mere 3° only and the displacement of the yacht is 10 tonnes, the component of the weight that is aligned with the inclined sea surface – and the speed of the boat – is 10000 x 9.81 x sin 3º = 5134N, equivalent to 523kg or 1155lbs!
Downhill in following seas, gravity very quickly exceeds sail forces as the wave starts lifting the boat
If the wave face is very steep, ultimately, a large fraction of the weight of vessel can get converted into driving force; this is why even heavy hulls with unlikely shapes can be seen getting on the plane in front of steep waves in heavy seas.
For small angles, this drive originating from the weight of the craft is essentially proportional to the slope of the wave: for a 6° down angle, the force would nearly double. If the boat doesn’t accelerate readily, the wave keeps catching up with the hull, lifting the stern further and the driving component of the weight keeps increasing, trying to accelerate the boat anyway.
The crew’s ability to control driving forces is essentially limited to sail forces and – unfortunately – those may at times represent a small fraction only of the total propulsive force incurred by the craft. Hence the well-known risk of “losing control” while running in heavy weather. The answer, however, is not automatically looking for ways to “apply the brakes”.
The Effect of Hull Resistance
Understanding the concept of hull resistance in the context of running downwind is crucial: ultimately, hull resistance is what determines how far the driving force is allowed to rise.
As the total driving force grows larger with the slope of the wave getting steeper, boat speed increases markedly, and so does hull resistance. Once hull resistance matches the driving force, an equilibrium is reached and speed stabilises.
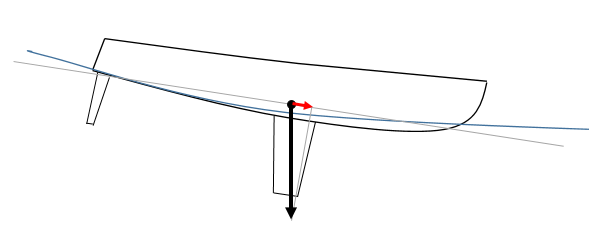
Once hull resistance (purple) equals the sum of the driving forces (red), speed stabilises.
If hull resistance increases quickly enough in relation with speed, the driving force may not be sufficient to keep the boat in front of the wave crest; this happens all the time to all yachts in light and moderate conditions. As long as the face of the wave is not too steep and the crest is not breaking, the wave can pass underneath the boat without issues. However, if the wave rears up, curls and breaks, the near-vertical front face and crest area are dangerous places where to be.
In the case of a breaking sea with a steep front face, the more easily the boat accelerates, the further away it remains from the turbulent water in the crest. A high-resistance hull requires a higher driving force and will ride higher up on the wave, down a steeper slope, often surging forward only as the crest arrives behind. This is a characteristics that is normally easily detectable long before sea conditions become dangerous.

Hull resistance is the most important factor in determining whether a yacht will keep ahead of a dangerous crest or not.
Different hulls present different resistance characteristics as speed increases. The key determining factor in terms of how resistance increases with speed is hull shape. Displacement in itself adds to resistance, but it also contributes to driving forces downhill.
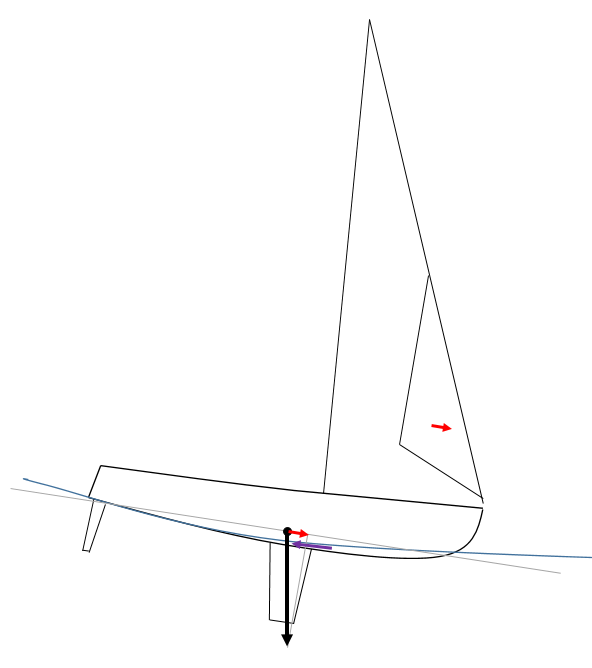
Easily-driven hulls with a suitable shape see their resistance increase more gradually and flatten out as they reach planing speeds. A high-resistance hull may or may not accelerate; in all cases, the forces involved are much more considerable.
Deep hulls with slack bilges and narrow sterns usually are the worst when it comes to building up resistance due to poor stern hydrodynamics and their inability to lift and accelerate regardless of the driving force; those essentially follow the solid orange curve above and will not accelerate meaningfully, no matter what. Most heavy small yacht hulls still feature reasonably firm bilges for stability reasons and their bottom surfaces are able to provide some dynamic lift above a certain speed. A lot of cruising yachts fall into that category. At some point along the orange curve, they lift and accelerate quite suddenly, following the dashed line.
Modern hulls with flatter stern sections and medium displacement progressively move towards the purple curve. Those are easier to drive at all speeds and don’t face such a marked transition between displacement speeds and a semi-planing regime. Provided other conditions such as course stability are also met, those are by far the safest and most predictable for running in following seas. It doesn’t take a light racer to run at speed in front of a steep sea, mainly suitable stern shapes and a moderate length/displacement ratio.
Many cruising boats have been designed under the assumption that speed was unimportant, or even that the boat was not and should not travel fast in the case of some well-known double-ender designs. This was overlooking the simple fact that the crew has little or no control over driving forces in a heavy following sea, and by extension little or no control over the speed the hull may actually achieve.
While a yacht doesn’t need to be generally fast to remain safe, it does need to be able to accelerate and reach high speeds at times without becoming dangerous
Typical Accident Scenarios in Following Seas
There is no good or safe way of getting caught into a breaking crest; there is too much energy being expended and too much uncertainty about what the vessel might do.
Some designs fail to accelerate as seas get steeper and do get caught in the crests; at this point they experience various difficulties such as maintaining steerage while surrounded by confused white water, or shipping seas over the stern. Another hint is hull trim in relation with the sea surface: is the hull riding bow up or burying the stem when accelerating? Those are very powerful leading indicators of what is likely to take place in bigger, steeper seas. As always, careful observation and understanding of the dynamics of the boat in the sea are everything and so-called “knowledge” is hardly relevant.
Pitchpole
A pitchpole happens when a boat rolls over longitudinally, end-over-end. It is the most publicised, feared and also least common cause of accident at sea.
The most dangerous situation develops in heavy following seas, when the front face of the waves can become overwhelmingly high in relation with the length of the vessel. In this instance, a boat that hasn’t managed to accelerate and outrun the crest can pitch down by the bow severely, and even engage the foredeck in the sea.
I once met the ex-skipper of a Contessa 32, who had left South Africa bound for Australia via a moderately southern route across the Indian Ocean. Along the way, a severe westerly blow developed, accompanied by heavy following seas. She described to me the boat surging in front of the waves out of control with the bow and part of the foredeck under green water. Shortly after, it pitchpoled and was left dismasted and seriously damaged structurally. Reaching Western Australia under jury rig took several weeks. Over a year was spent on the hardstand repairing the damage incurred.
A very interesting and detailed account of an accident in following seas was provided by Miles Smeeton following his attempted passage from Australia to England in 1956 [1]. His heavy 46′ ketch Tsu-Hang rode up the near-vertical face of a huge following sea in the South Pacific and pitchpoled. It couldn’t outrun it and couldn’t ride it either. On a subsequent attempt, following ill-advice, he stopped and hove-to in heavy seas; he was readily rolled and significantly damaged again in conditions that were far less extraordinary than the first time.
In spite of the examples above, yachts that have actually been pitchpoled are very rare exceptions. Most yachts don’t track straight long enough to get into this situation, or they engage the forebody into the sea, yaw and then partly fall to one side before getting rolled and capsized more conventionally.
Broach
Broaching takes place when a vessel running before the sea no longer tracks straight and comes beam-on into the sea. This is the most common incident while running before steep seas.
As developed earlier, as the wave approaches and the slope increases, a fraction of the weight of the vessel adds to the driving force from the rig and windage, causing the boat to accelerates. If everything goes well, the hull rides bow up and keeps up with the crest until the wave has finished breaking.

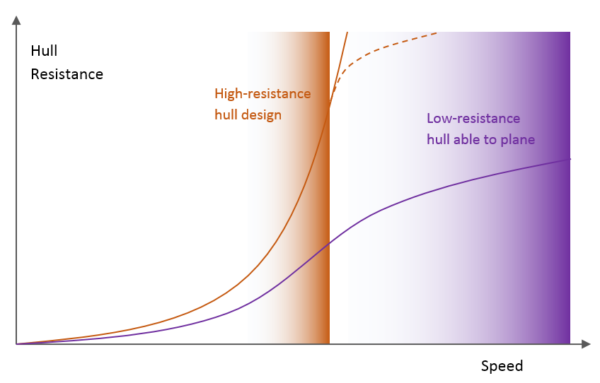
Hull resistance (purple) is equal to the sum of the driving forces (red). If the boat travels at the same speed as the wave, it will run until the wave slope reduces; otherwise the crest will keep catching up.
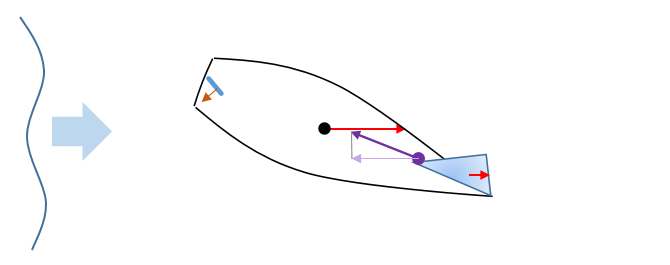
When hull shape is inadequate or when a bow-down attitude develops as speed increases, hull resistance can shift forward drastically while the driving component of the weight is still acting through the centre of gravity, further aft.
This boat failed to accelerate enough and is now running down a steeper slope. The driving component of the weight acting through the centre of gravity is dominant; resistance has shifted forward due to a bow-down attitude or the characteristics of the hull shape itself.
If the boat yaws for any reason, the component of the weight parallel to the surface is no longer aligned with the direction of travel and contributes to amplifying the rotation.
Any small tendency to yaw is immediately amplified by an unstable force moment between the weight of the boat still acting downhill and the hull resistance that opposes forward speed. If the rudder is unable to overcome the yaw moment, the boat will come beam-on to the wave crest.
An inadequate hull shape is one where hydrodynamic pressure moves towards the forebody as speed increases. This compromises course stability and the key risk is a broach that brings the vessel beam-on into the crest. At this point, the boat is no longer running before the sea and this case is discussed in another article dealing with yachts caught in beam seas. The most common outcome following a high-speed broach in a following sea is getting dumped into the trough from the crest, or rolled, or both.
Unlike often suggested, in a following sea, it is not the oncoming waves pushing on the stern of the yacht that cause course instability. Most yachts that are unstable downwind start yawing long before the crest gets anywhere near the stern. It is the displacement of the hydrodynamic resistance forward that leads to an unstable equilibrium of the forces acting on the vessel.
Course stability in following seas and hull resistance are also the object of a related and more detailed discussion in the design of the Nordkyn hull, where superb seakeeping properties were sought not only downhill, but at all wind angles.
Practical Implications
Designs featuring high-resistance hulls generally become dangerous in following seas at some point. They either end up tangled in the breaking crests or accelerate at steep downward angles on the faces of the waves, at the risk of engaging the bow into the sea. Conversely, experience shows that vessels able to accelerate and keep up with problematic seas don’t ship water over the stern and simply stay ahead of the waves for as long as they break.
With considerable drive originating from the weight of the boat, sail choices made by the crew in following seas primarily impact the minimum speed the vessel keeps on the back of the waves and in the troughs. Steep seas still drive the hull close to the speed they travel at and it is not unusual to see even rather sedate cruising designs surging to 20-25 knots while carrying little or no sail at all in a stiff blow in the high latitudes. As long as they ride bow up, track and remain steerable, all is as good as it gets.
This is not always the case however. Most of the problems experienced running in following seas originate from hull shape, with a special mention for the geometry of the stern sections, sometimes compounded by poor rudder design. This means such issues are not readily overcome by choices the crew can make, other than staying within the capability limits of the design. Attempting to run before heavy seas in a vessel that buries its bow or yaws uncontrollably is a near-guaranteed accident before long.
My 9-metre sloop Yarra was once hauling upwind in a huge sea under #2 jib alone in the middle of the North Atlantic. This sail configuration left the helm largely neutral. Half-way into the night, one of the steering vane control lines attached to the tiller somehow parted, the helm moved around and by the time I had realised something was happening and jumped outside, the boat was way off course.
Now, this is where things became interesting. I found the sloop broad-reaching at high speed down huge seas and the small jib sheeted in hard forward was now filling from the leech, sometimes taking aback momentarily, and essentially steering the boat in spite of the loose tiller. I couldn’t really improve on that so, working as fast as I could, I mended the steering line in the dark. During all that time, it never once showed even a hint of a tendency for broaching; the sail forward wouldn’t allow it. I returned the boat on its upwind course, but also made a mental note of this interesting discovery. Subsequently, I used this concept at the odd occasion by sheeting a storm jib from both sides on the centreline of the boat, using it for steerage rather than propulsion straight downwind. It provided a huge improvement in course stability and safety in following seas, but only worked in very strong winds. Provided the sail was sheeted in very flat, the inevitable and repeated gybing was of no concern.
Accidents in following seas happen very quickly and are often violent as boats tend to be thrown forward from the crests. Inexperienced skippers are often fooled by the relative peace and comfort that comes with running before the sea and don’t read the warning signs, or won’t act on them, sometimes by lack of an alternative strategy.
One alternative strategy is turning around and punching into it under sail; some designs that don’t handle at all in following seas may simply have no other safe option; designs that won’t run and won’t sail upwind either can end up out of options altogether and shouldn’t be there in the first place.
Towing Drogues
Drogues are anything attached to the stern that will cause increased drag at speed. It can range from a long warp, some warp and chain or more sophisticated and purpose-designed devices like a Jordan Series Drogue, a collection of little parachutes attached to a long warp.
Attempting to tow drogues in heavy weather is a double-edged sword:
- By increasing drag and overall resistance, a drogue pulls the yacht further up the slope of the wave as it approaches, into a steeper gradient and closer to the broken water of the crest.
- By introducing an additional resistance force located as far aft as practical, the drogue can mitigate or cancel the shift in hydrodynamic resistance towards the forebody of some hulls. This can greatly help with preventing excessive course instability from developing.

Towing a drogue shifts the average position of the resistance forces closer to the centre of gravity and helps cancelling unstable yaw moments, but at the cost of increasing total resistance and pulling the vessel up the wave slope.
I personally don’t favour the use of drogues in general. I wouldn’t think of deploying anything alike unless there was a clear-cut and observable reason for doing it. I will rather stabilise tracking using aerodynamic means, as described further up, than slow the hull down in the sea. Different boats exhibiting different properties in following seas may be forced to opt differently.
Towing a suitable drogue can provide considerable benefits for boats that lack the course stability required to run in following seas. How much and how long for is a matter that will still depends on the hull design; drogue or not, the boat will still accelerate in front of a wave steep enough and may still bury the bow.
Once deployed, most drogues aren’t practical to retrieve before conditions subside due to the enormous forces involved. If the strategy doesn’t work out or becomes unsuitable, there are few options but cutting them away.
Historical Considerations
Historically, a variety of designs demonstrated sufficient capability for avoiding damage by outrunning heavily breaking seas. One of the first adepts of such a tactic was the Argentinian Vito Dumas [2] in the early 1940s on board the 9-metre Legh II who seemed to have acted from instinct and observation, followed by Bernard Moitessier some 20 years later on board his 12-metre ketch Joshua as he got on the verge of an accident towing warps and trying to slow his boat down [3]. Both vessels were relatively flat-bottomed double-enders with a very firm turn of the bilge, which essentially enabled them to plane ahead of exceedingly steep waves, and neither were overloaded, an aspect Moitessier was adamant about as he already had to contend with a heavy steel hull.
A body of rhetorical justifications was developed long ago about how a hull should not accelerate and split the breaking crests by the stern. While these theories succeeded in relatively gentle and well-formed seas with modest crests, they never managed to cater for a steep wall of water chasing a yacht at high speed and – unsurprisingly – the designs they produced also failed to cope spectacularly in such situations. The concept was flawed and the argument is senseless today. Knowledge, materials and construction methods all readily allow producing strong moderate displacement hulls with shapes that are far superior for accelerating and keeping ahead of waves faces that are simply too steep to be successfully negotiated in any other ways.
Since the early 1990s, the short-handed offshore ocean racing circuit has probably put more small boats in huge following seas than ever before by venturing eastwards deep into the Southern Ocean for weeks at a time, but the strategy that was followed by Vito Dumas in the early 1940s and then more explicitly documented by Bernard Moitessier in the late 1960s using an unlikely design still stands unchallenged. Today’s boats are better at implementing it.
Running before the sea in heavy weather does remains the ultimate option for a vessel once sea state rules out all other strategies, so if the accent is placed on survivability and sailing in latitudes where truly extreme conditions are encountered from time to time, selecting a design that does handle following seas in a sound and predictable way is essential.
Read additional articles about seamanship and heavy weather dynamics.
References
[1] “Once is Enough”, Miles Smeeton
[2] “Alone Through The Roaring Forties”, Vito Dumas
[3] “Cape Horn: The Logical Route”, Bernard Moitessier
Dear Mr Bretscher,
In my search for a seaworthly boat I am (till now) attracted by the Contessa 32. By chance I found your fantastic website from which I learned a lot about sailing hydrodynamics.
What I do not understand is your statement “Narrow and pinched stern lines were always a mistake, they gave boats that were unable to accelerate in following seas and became unmanageable as waves caught up with them”
Is this result of the wake created by the classic forms of non planing hulls? On the other hand broad sterns will be more lifted up by the wave coming from behind and so putting the bow downwards.
Best Regards
Marc
Hello Marc,
Pressure (or wave-making) resistance on a hull has two main contributors. First, the hull needs to part the water forward and this results in the pressure wave known as the bow wave. Next, the water needs to “close” back behind the boat. This can never be achieved perfectly because a turbulent layer of water (the boundary layer) develops and grows along the hull and it prevents the streamlines from precisely following the hull shape astern. Stern pressure pushes the boat and reduces resistance, but the existence of the boundary layer means that the stern pressure can never be as high as the bow pressure and the difference is at the origin of the pressure resistance.
Now, if the stern lines are very curved, then the flow can stop following the shape of the hull and eddies and water recirculation appears in this separated region. When this happens, it causes a much more significant loss of pressure in the stern region.
Pinched stern lines cause this to happen once the speed reaches a limit. People have observed this behind Colin Archer-type hulls for a very long time and even offered theories about the “benefits” of that strange wake (!), but it is complete garbage. Deep buttock lines suddenly curving upwards before the transom can also cause flow separation even with a broad stern. Many modern boats are like this because the designer wanted more depth inside to fit the engine, accommodation etc, but it is very unfortunate in terms of hull hydrodynamics. The Halberg Rassy 44 is an example of this, the hull is completely distorted and deepest way aft…
When significant pressure loss occurs around the stern, the positive pressure at the bow is no longer compensated for and resistance moves forward. This promotes course instability and broaching. This is why many old designs become completely unmanageable and dangerous in following seas. This includes many IOR-era designs, not just the old double-enders etc.
The shape of the stern hardly makes any difference to trim. Have you ever seen a boat with the stern deeply immersed in a wave and the bow up or flat? The trim is determined by the position of the boat on slope of the wave front and this is mostly related to hull resistance. What makes all the difference in the end is whether the steep part of the wave can catch up with the boat and pitch it bow-down or not. If the hull is slippery, it will keep ahead of a steep crest with a sudden burst of speed until it has smoothed out enough to be crossed. A large wave about the break has a vertical face near the top and it can’t be crossed by a small boat regardless of stern shape. If acceleration causes a massive resistance increase forward, then an accident has to follow.
I once met an English sailor who had sailed a Contessa 32 from South Africa to Western Australia in the late 1990s. She got into high winds and heavy following seas about half way and described to me that the boat was out of control with the foredeck completely underwater and the rudder unresponsive. What followed before long was rather violent because a wave lifted the stern even higher and the boat pitchpoled. Not only the rig was wiped out, but the hull suffered significant structural damage, including a fractured bulkhead. She eventually reached Perth under jury rig.
Many Contessa 32s have sailed around in the Tropics, but true bad weather just doesn’t exist there. As far as I am concerned, it is a bad and a dangerous boat. Hindsight is always a wonderful thing of course, but – assuming that a Contessa 32 can point acceptably in high winds and heavy seas, a very open question – had she turned it around and sailed upwind, she might have come out better off because designs like this one just won’t run in heavy seas.
Another one is the Cavalier 32, with pinched stern lines, but a fin keel this time. They become completely unsteerable in following seas and broach and I know of one that was also dismasted on the same passage while trying to run and eventually made Hobart under jury rig.
Look for a boat with a reasonably straight run of the lines aft, a spade rudder or a very small skeg and a decent transom. It will handle much better at sea, even in good weather.
Another boat of a similar size is the Lotus 9.2 and quite a few were produced here in NZ. The rudder design is terrible, like a small barn door with a hinge in the middle, but apart from that these boats sail and behave quite well in the sea. A couple of years ago, I advised someone about the design of a new transom-hung rudder for it and we eliminated the skeg entirely. It turned it into a different boat, faster and much more responsive at the helm.
Best regards,
Eric
I have just come across this and find it very interesting having read many accounts of different strategies from Slocum, Voss, to Moitessier etc. In your reply above are you basically just saying pinched sterns cannot plane and when being driven too fast instead shift shift their CoR forward in trying to plane from a position further forward. Whereas a hull design with a sharp transom begins to plane without any changes in CoR?
And following that, surely then there is the risk ones on a plane that the boat will plough into the trough too fast and pitchpole? Should there not be some balance between outrunning them and running into the trough too fast, or are you refering to very very large wave periods?
Surely in short wave periods where the troughs can burry the bow would running with following seas be a bad idea no matter the hull design?
Ned,
Any stern that has high curvature or steep buttocks lines will eventually suffer from flow separation as speed increases. The corresponding and sudden pressure loss means that the hydrodynamic resistance moves forward at that point. It is also important to understand that it is of course the underwater part of the stern that matters. Even a double-ender could have relatively flat and straight lines aft, if the design is light in particular. Conversely, many transom hulls have atrocious hull lines, because the buttocks are deep very far aft and then rise too quickly. The flow must be able to leave the hull in a near-straight line close to parallel to the surface.
In a typical following sea in heavy weather, the waves are well developed and near-invariably travel faster than the boat. When an overly steep wave chases the stern, the boat must be able to accelerate, but it only keeps up with the crest momentarily until is flattens out, it doesn’t outrun it. The power required to do so isn’t there naturally. As a result, hulls don’t plow into the troughs, but they can plow into a secondary crest in the trough in some circumstances. This is where sufficient freeboard and volume forward become important safety factors with correct handling and strategic choices from the crew.
This must not be confused with the situation where the stern is lifted so high that the bow engages into the sea, or the whole boat is picked up by the breaking crest and thrown forward with various unhealthy results. This results from a lack of acceleration and speed to keep the hull out of the steep wave slope.
In the developing stages of a gale, waves can be both steep and short, but this means they are also slow. Fast boats can sometimes find themselves stuck in a trough, travelling at the speed of the sea and unable to exceed it. This happened to me with Nordkyn doing 14 knots running in 40 knots of wind south of Stewart Island (NZ) and I had to reef further because I was driving the bow into the back of the wave ahead of me while being pushed by the front of the one following me. Travelling in the trough at the speed of the sea was both safe and comfortable. I later mentioned this to a friend who is a commercial fisherman in the area and, in these conditions, they also have to throttle back with their large semi-planing vessel, because they are unable to overcome the wave in front of them in spite of having 1300HP available.
Outrunning the crests and climbing the back of the wave in front can happen, but it is uncommon. Firstly, the wave period T must be relatively short (because the velocity of the wave is V = 3 x T, V in knots, T in seconds) and the waves must be relatively low and well-formed. Secondly, the crew needs to drive the boat like a bat out of hell to succeed in sailing uphill at high speeds. I did this once before a big SW heading up the East coast of the South Island (NZ). Hovering around 14.5 knots, I was able to catch up with the crest in front of me and plunge on the other side, which is quite exhilarating. It can come with its own set of risks and it is an acute matter of judgement of course. Breaching a crest on the verge of collapsing can cause the boat to fall off it and possibly pitchpole. There is a fine balance between the length of the boat and the size of the sea.
In conclusion, running before the sea with a hull that is hydrodynamically good shouldn’t prove to be much of an issue, but controlling its speed can be important. While some ultra-light racers may go too fast even with no sail in extreme winds and run into trouble due to design issues such as a lack of buoyancy forward, the common problem for cruising yachts is becoming unmanageable because they are in fact unable to go fast enough. For these, the speed causes the problems, but the root cause is in the shape of the hull and slowing down doesn’t actually lead to a solution.
Kind regards,
Eric
Dear Mr Bretscher,
Thank you for your excellent analysis. Was omission of strategies employing a sea anchor intentional?
Patrick,
Yes. Sea anchors can prevent drift, but have no role in heavy weather. If the weather is truly bad – which means that the sea state is dangerous – sooner or later the sea anchor will be required to pull the boat through the vertical face of a wave advancing at 15 to 30+ knots. This is not going to happen: something has to fail because the forces at play are unmanageable. The boat then ends up lying ahull in a breaking sea, the absolute worst position to be in.
I only ever met one person who actually deployed a sea anchor in a truly heavy sea, the boat was a Cavalier 32 out of South Africa. It initially helped with keeping the bow into the sea. The warp parted before long and then the boat was rolled and dismasted almost immediately. It made landfall in Australia under a jury rig many weeks later.
It is a stupid strategy, because it is akin to driving at speed down a dead-end street with no brakes. Once you have thrown this over the side, you can’t retrieve it and the crash is unavoidable.
There was a time when yachts were simply unable to sail either upwind or downwind past a point because of their design and construction and became completely unmanageable in heavy weather. People understandably looked for any possible way to stop them from lying exposed beam-on in the sea. Today’s reality is that a yacht that can’t point in high winds has no place in a blow offshore, because it is dangerous by design. We see more and more boats made unsafe because their owners pile up ridiculous windage (and weight aloft) without a clue about the consequences this has on seakeeping.
Kind regards,
Eric
Incredibly useful!