Last Updated on 05 August 2016 by Eric Bretscher
This article follows Transverse Stability, Part 2: Stability Curve and Knock-Down Energy
If you are looking for information regarding the stability of monohull yachts hit or capsized in beam seas, the subject is treated in the next part, Transverse Stability, Part 4: Sailing Yachts at Sea.
In the case of monohulls, regardless of the type of vessel and hull used, various hydrodynamic effects at speed alter the stability characteristics determined at rest. All hulls shapes and crafts do not react the same.
Displacement Hulls
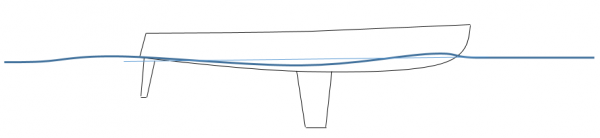
Displacement hulls create a wave system as they travel through the water. Once the so-called theoretical hull speed is reached, the wave pattern reduces to a bow wave, a trough at midships and a stern wave only. Its amplitude depends on displacement, the shape of the hull itself and how hard the boat is pushing against the limit.

Wave pattern around a heavy-displacement hull near its maximum sustainable speed
In the case of a vessel producing a large midships trough, the hull can heel into this trough and doesn’t achieve all of its static form stability.
I remember the instance of a 8.7-metre French sloop I had met over a few months in Chili that was “pulling” a phenomenal midships trough at speed. It was an ex-prototype racer with a 3-tonne displacement loaded and a deep trapezoidal keel that had been converted for ocean cruising by an enterprising couple and two cats.
In the end, it went from the Mediterranean to Tahiti via the Beagle Channel and Patagonia with no auxiliary engine, actively trading cats all along the way.
In spite of the surprisingly large trough behind the bow wave, it still seemed to sail acceptably, but there was clearly something amiss with the volume distribution in the hull.
The flatter the wake, the less likely form stability is going to suffer at speed; this tends to put heavy displacement vessels at a disadvantage. This phenomenon reduces the initial slope of the stability curve primarily, i.e. stability at normal heel angles, and potentially the maximum righting moment available in a broach, because it is otherwise not normally feasible to sail at high speed and very high angles of heel in the same time.
The wave pattern in question progressively forms as the Froude number approaches 0.45 or so: the crest of the second wave behind the bow wave moves back as speed increases until it reaches the stern region. The mechanism is always the same, but some slow vessels can struggle to actually reach Fn=0.45. This translates into a velocity that can be calculated as:
V = 2.74 x √LWL, speed in knots and LWL = waterline length in metres, or
V = 1.51 x √LWL, speed in knots and LWL = waterline length in feet
Vessels that readily extend their wetted hull length with speed, such as designs featuring an overhang leading to a low transom, should include the length of that overhang. It is the dynamic waterline length that matters.
Lighter hulls normally build up less pressure at the same relative speed and create a smaller wave pattern.
The Effect of Appendages
On a fin-keeler equipped with an efficient foil, the keel literally flies through the water like a wing. Attempting to sway the foil alters the angle of incidence of the flow on the section and results in a strong reaction force opposing the movement.

A rolling motion sways the foil in the flow stream, changing the angle of attack. The foil develops a lift force that always opposes lateral motion, trying to cancel the roll. When the foil is travelling straight (middle), the only force present is drag.
This is why fin-keelers tend to steady-up so readily as soon as they gain some speed. Motor vessels can benefit from this effect by using stabilising fins, but on a well designed craft, the rudder itself can provide considerable dynamic stabilisation already.
On fin-keeled yachts, the hydrodynamics of the appendages also become involved when the vessel is hit beam-on by a breaking sea. This case is developed in Part 4 of this series.